In queste settimane alcune classi seconde del nostro istituto svolgeranno un progetto presso l’LTO che unisce storia dell’ingegneria, fisica e laboratorio. Per accompagnare l’attività ho progettato insieme alla mia collega di Fisica una serie di lezioni che permetteranno agli studenti di realizzare un modellino stampabile in 3D del celebre ponte autoportante di Leonardo: una struttura che si monta senza colla, senza chiodi e senza corde, sfruttando esclusivamente geometria, attrito e distribuzione dei carichi.
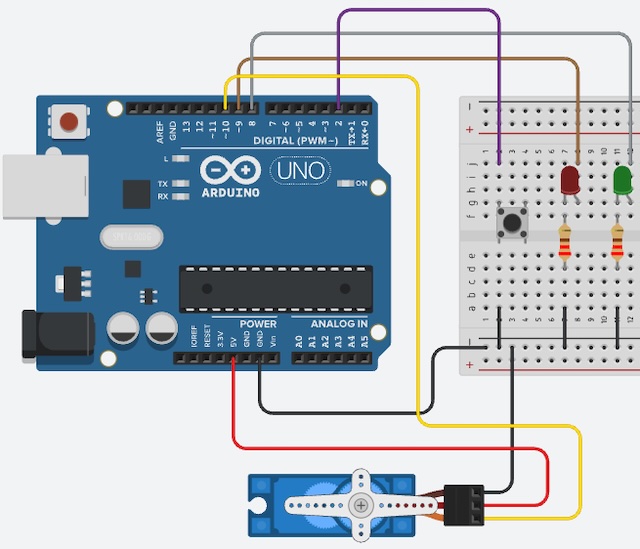
L’idea è semplice: fornire agli studenti un percorso guidato di modellazione e stampa 3D, in cui ciascuno possa costruirsi il proprio ponte e personalizzarlo (lunghezza e sezione dei moduli), e probabilmente, tempo permettendo, si tenterà di realizzare una prova pratica: posizionare il ponte tra due banchi e farvi transitare un piccolo robot (probabilmente un mBot2) per verificare stabilità e capacità di carico.
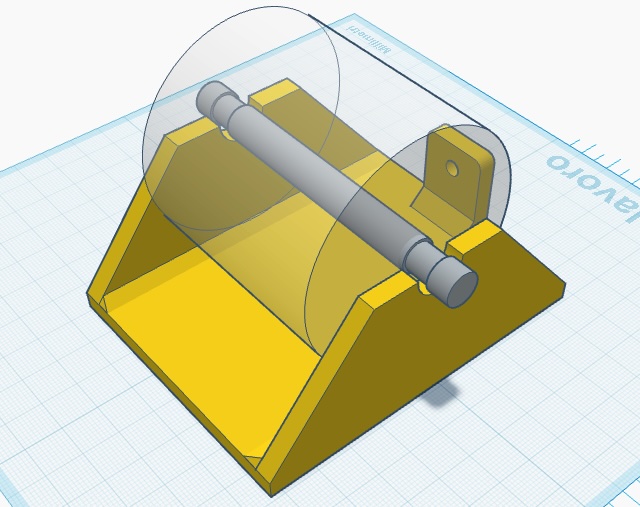
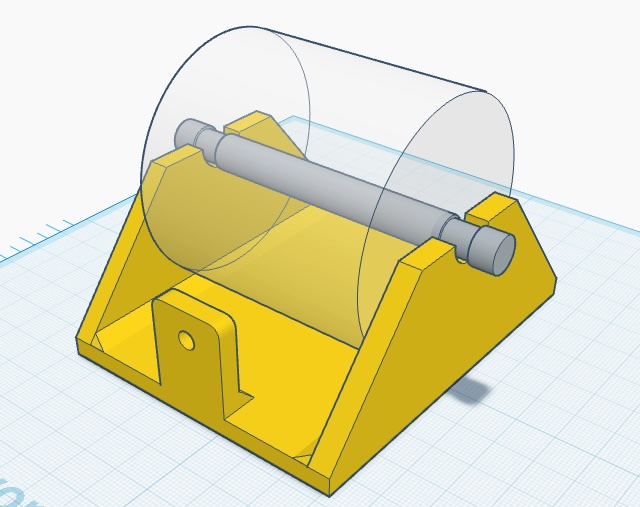
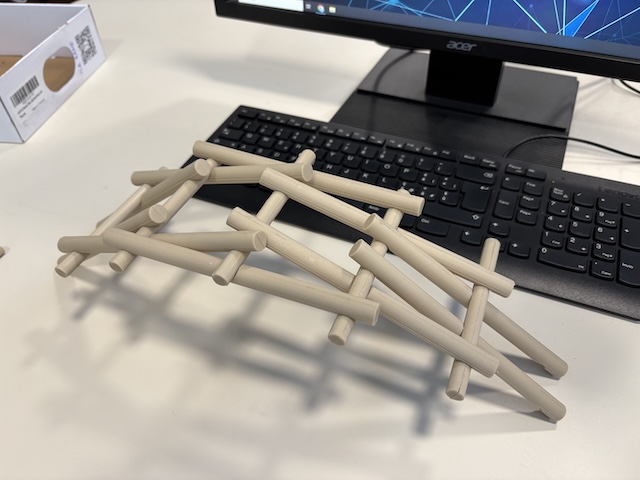
Poiché gli studenti non hanno mai modellato in 3D e non sanno usare la stampante 3D ho provveduto a realizzare un modellino del ponte in modo che durante la fase di progettazione abbiano idea di cosa dovranno realizzare.

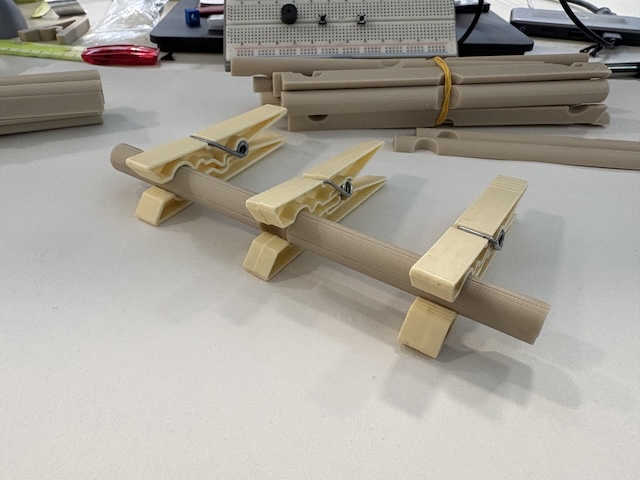
Verranno realizzate due versioni, una in legno di dimensioni grandi ed una versione da far realizzare agli studenti stampata in 3D.
Leonardo da Vinci (1452–1519) studiò e disegnò numerose soluzioni di ponti “rapidi” e trasportabili, utili in contesti civili e militari. Tra questi, il più affascinante per essenzialità è proprio il ponte militare in legno autoportante, documentato nel Codice Atlantico (Codex Atlanticus), la grande raccolta di fogli con appunti e disegni conservata presso la Biblioteca Ambrosiana.
Nel foglio comunemente citato per questo progetto (ad esempio f. 71 recto) si riconosce una struttura costruita con travi incrociate, dove ogni elemento “regge e viene retto” dagli altri: un principio che oggi, in ambito strutturale, è vicino ai sistemi reciproci (reciprocal frames).
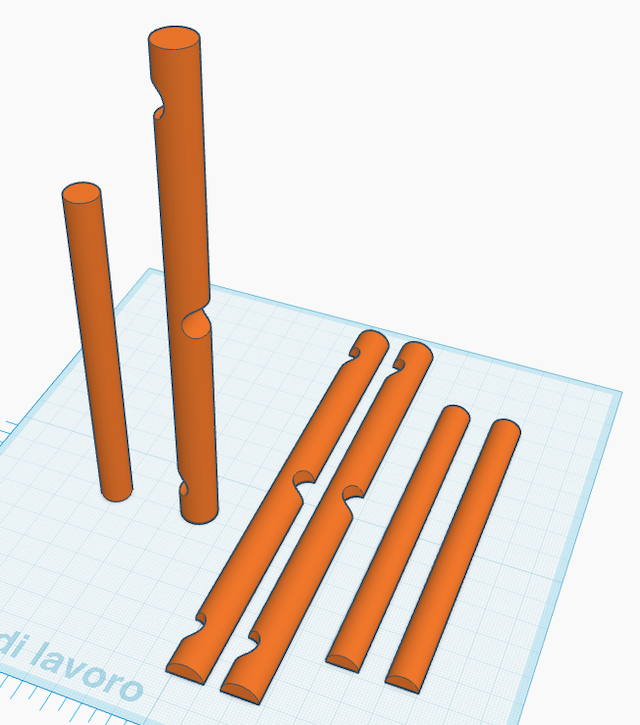
Nel mio caso ho ricostruito il modello basandomi sul disegno e su ricostruzioni simili sviluppate da altri maker e divulgatori online, ma ho scelto una semplificazione didattica molto utile: il ponte è realizzato soltanto con due moduli ripetitivi che sono stampati in sezione in modo da accelerare la stampa, le due falde dei rispettivi moduli saranno incollate insieme.

Per chi fosse interessato e desidera realizzare il ponte potete prelevare i sorgenti per la stampa 3D seguendo il link.
Di seguito la sintesi della progettazione didattica. Agli studenti verranno consegnate schede di lavoro specifiche.
Obbiettivi didattici
Fisica
- equilibrio statico e condizioni di stabilità
- attrito statico vs dinamico (quando “tiene”, quando “parte”)
- forze interne: compressione, taglio, (cenni di) flessione
- distribuzione dei carichi e percorsi di forza nella struttura
- differenza tra struttura “che funziona per forma” e struttura “che funziona per fissaggi”
Tecnologia e making
- progettare pensando alla stampa 3D
- gestione errori: ritiro, tolleranze, orientamento, adesione al piatto
- iterazione: prototipo > test > modifica > nuova stampa
Matematica e geometria applicata
- proporzioni, scale, vincoli dimensionali
- relazione tra sezione e rigidezza
- ragionamento parametrico: una variabile cambia il comportamento del sistema
Competenze trasversali
- lavoro in team (ruoli: modellatore, slicer, collaudatore, documentatore)
- documentazione tecnica (foto, note, problemi riscontrati, versione del modello)
- pensiero critico: “perché questa variante regge meglio?” con dati e osservazioni
Percorso laboratoriale dalla modellazione alla stampa: struttura della lezione
Ecco una traccia che gli studenti possono seguire (in modo guidato, ma con margine di personalizzazione):
- Lettura del problema (reverse engineering)
- Che cosa deve fare il ponte?
- Da quali elementi è composto?
- Quale parte è ripetuta e quale “regola” l’incastro?
- Modellazione dei due moduli (CAD)
- Disegno 2D di base > estrusione
- Inserimento di incastri/sedi
- Controllo quote critiche (tolleranze minime per montaggio)
- Parametri di personalizzazione
- Lunghezza del modulo (ponte più o meno lungo)
- Sezione (spessore/larghezza: rigidità vs consumo materiale)
- Eventuali micro-varianti: smussi, arrotondamenti, texture
- Esportazione STL e slicing
- orientamento consigliato
- niente supporti (se progettato correttamente)
- scelta infill/perimetri in funzione della rigidità richiesta
- Stampa e controllo qualità
- verifica dimensionale rapida (soprattutto incastri)
- prove: i pezzi scorrono? si incastrano troppo? sono laschi?
- Montaggio e collaudo
- montaggio su banco
- “ponte tra due banchi” (campata reale)
- test con carico progressivo
Perché il ponte riesce a stare in piedi
Questo ponte funziona perché combina tre idee chiave:
- Incastro geometrico (vincolo di forma)
I pezzi sono progettati per “appoggiarsi” in modo coerente: la forma guida l’assemblaggio e impedisce che gli elementi scivolino via subito. - Attrito tra le superfici
Una volta in posizione, il peso dei pezzi aumenta la forza normale tra le parti e quindi l’attrito, che ostacola lo scorrimento. - Percorso dei carichi (load path)
Il carico applicato sul ponte non grava su un singolo elemento: viene “ridistribuito” lungo l’intreccio delle travi, generando una specie di arco/volta discreta. Questo rende la struttura sorprendentemente rigida rispetto al materiale impiegato.
Dal disegno storico al modello 3D: due moduli, infinite varianti
La scelta di lavorare con due soli moduli ripetitivi è perfetta per una lezione di modellazione:
- riduce la complessità (due pezzi “master” invece di molti diversi);
- rende immediata la logica della modularità (un concetto chiave dell’ingegneria);
- abilita la progettazione parametrica: cambi una quota e ottieni un ponte diverso.
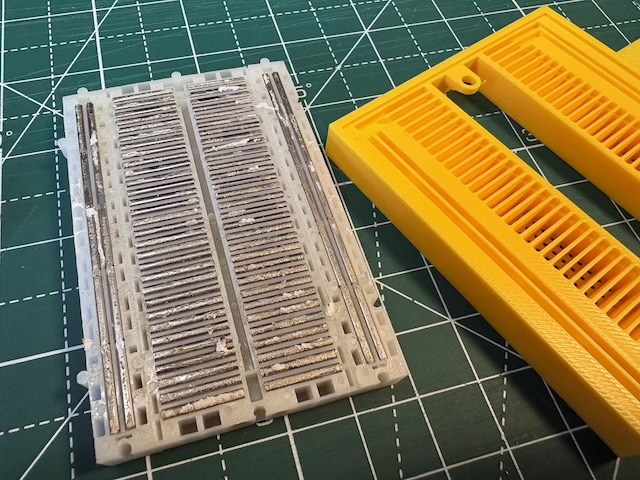
Perché sezionare i pezzi
Uno dei moduli ha una dimensione “lunga” che, su molte stampanti, può portare a:
- distacco dal piatto (warping o scarsa adesione),
- vibrazioni/infill poco uniforme su elementi sottili,
- fallimenti verso fine stampa (quando ormai si è perso tempo).
Per questo ho adottato una soluzione semplice e molto didattica: sezionare trasversalmente il pezzo nella direzione più lunga. In pratica:
- ottengo due parti più “compatte” e stabili in stampa;
- riduco il rischio di sollevamento degli spigoli;
- accelero la produzione di set completi per la classe.
È anche un ottimo pretesto per parlare di orientamento di stampa, adesione al piano, ritiro termico e scelte di progettazione “per la manifattura” (design for manufacturing).
Buon Making a tutti 🙂



 Nella
Nella