Arduino ha annunciato VENTUNO Q, una nuova piattaforma descritta come una single-board computer progettata per applicazioni di intelligenza artificiale, robotica e attuazione. Il lancio è avvenuto oggi 9 marzo 2026 sul blog ufficiale Arduino, che la presenta come una soluzione pensata per unire su una sola board capacità di percezione, decisione e controllo del mondo fisico.
Per chi segue l’evoluzione dell’ecosistema Arduino, si tratta di un passaggio interessante: non più solo microcontrollori per prototipazione rapida, ma una piattaforma che punta a coprire anche scenari più avanzati, vicini alla robotica intelligente, alla computer vision on-device e ai sistemi che richiedono AI locale e controllo real-time. Questa lettura è inferenziale, ma coerente con il posizionamento ufficiale dichiarato da Arduino.
Una piattaforma pensata per “percepire, decidere e agire”
Uno dei concetti chiave con cui Arduino presenta VENTUNO Q è l’idea di una piattaforma capace di gestire, nello stesso sistema, l’acquisizione dei dati, l’elaborazione AI e il pilotaggio di attuatori. Il messaggio è chiaro: non soltanto “eseguire modelli”, ma costruire dispositivi in grado di interagire fisicamente con l’ambiente.

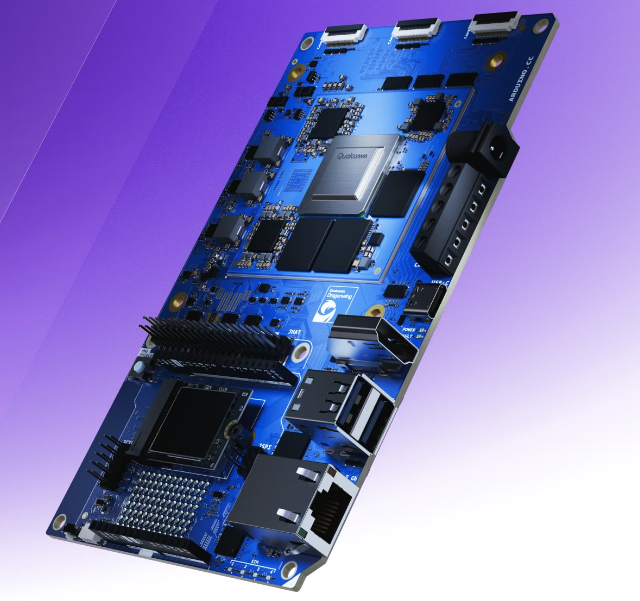
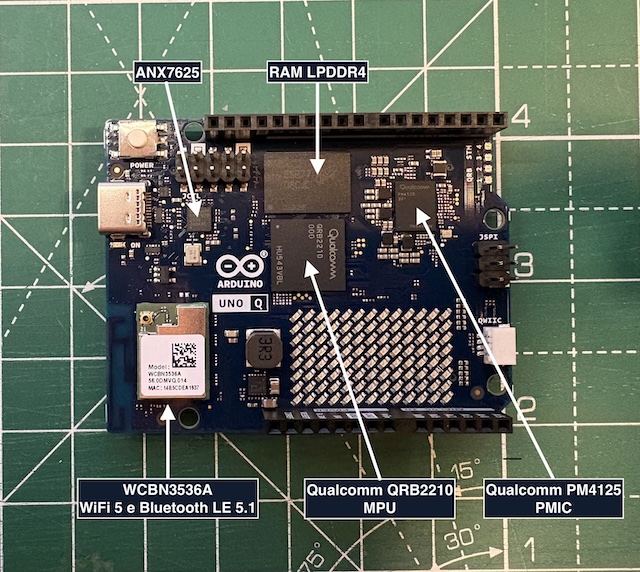
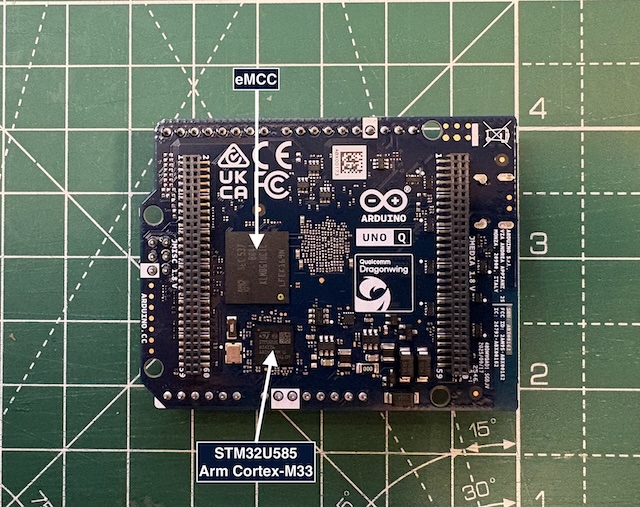
Nelle specifiche tecniche Arduino parla infatti di un’architettura “dual-brain“: da una parte un processore Qualcomm Dragonwing IQ8, dall’altra un microcontrollore STM32H5, collegati tramite un bridge RPC. L’obiettivo è separare i compiti di elaborazione complessa da quelli che richiedono tempi di risposta deterministici.
Architettura dual-brain: AI da una parte, controllo real-time dall’altra
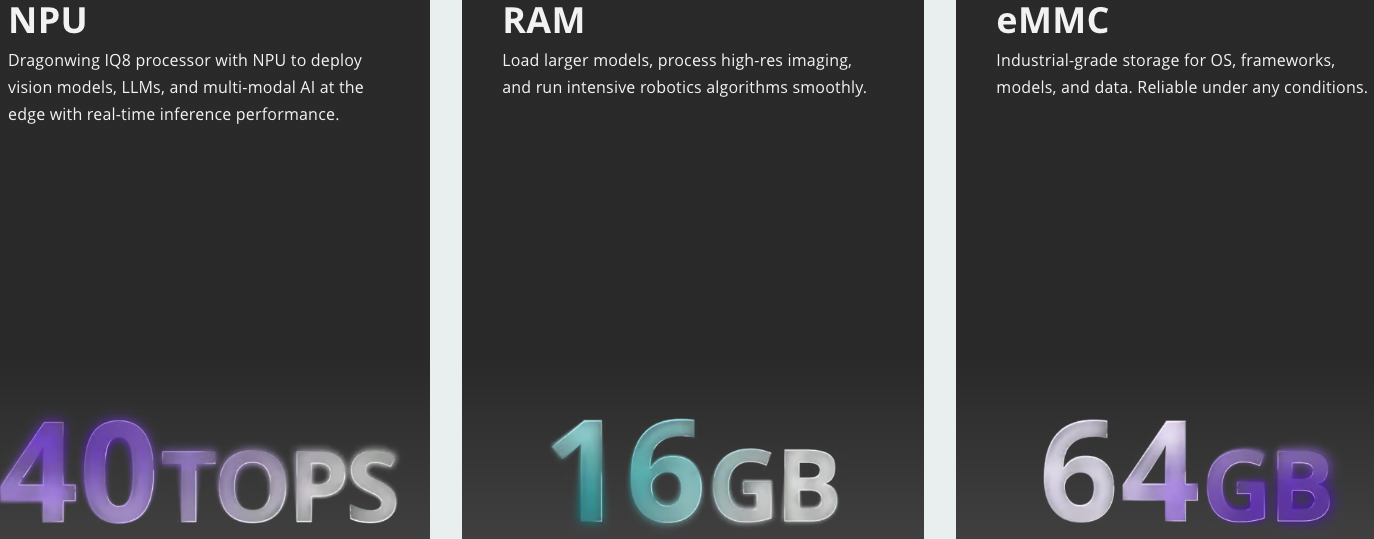
Secondo Arduino, il processore principale Dragonwing IQ8 è dedicato ai carichi di lavoro più pesanti, inclusa l’inferenza di reti neurali, mentre lo STM32H5 si occupa delle operazioni a bassa latenza e del controllo in tempo reale. Sul blog ufficiale viene inoltre indicata una capacità fino a 40 dense TOPS (Tera Operations Per Second) per l’accelerazione AI, insieme a 16 GB di RAM e 64 GB di memoria espandibile.
Linux embedded e Arduino Core su Zephyr
VENTUNO Q può eseguire Ubuntu o Debian sul lato applicativo, mentre il microcontrollore real-time usa Arduino Core su Zephyr OS. Questa combinazione è rilevante perché mette insieme un ambiente Linux, più adatto a strumenti evoluti, librerie e workflow AI, con una componente embedded deterministica più vicina alla filosofia del controllo industriale e della robotica.
In termini pratici, ciò potrebbe consentire di sviluppare applicazioni in cui una parte del sistema gestisce visione, audio, interfacce o modelli AI, mentre l’altra mantiene il controllo puntuale di attuatori, encoder, segnali PWM o logiche di sicurezza. La possibilità concreta dipenderà naturalmente da tool, documentazione e maturità dell’ecosistema, ma la direzione indicata da Arduino è questa.
App Lab, Python e integrazione con Edge Impulse
Ovviamente VENTUNO Q si collega ad Arduino App Lab, l’ambiente in grado di unificare sketch Arduino, script Python e flussi di lavoro AI. Sarà possibile anche l’integrazione con Edge Impulse Studio e il supporto a modelli provenienti da Qualcomm AI Hub ed Edge Impulse.

Esempi applicativi: LLM locali, VLM, riconoscimento vocale automatico (ASR), sintesi vocale (TTS), stima di pose e gesture, oltre a funzioni di object tracking offline. Per chi lavora nella didattica o nella prototipazione, questa è forse una delle promesse più interessanti: portare l’AI “vicino” al dispositivo, senza dipendere sempre dal cloud.
Compatibilità hardware: Arduino, Qwiic e Raspberry Pi HAT
Arduino indica una compatibilità piuttosto ampia con diversi ecosistemi hardware. Nello specifico, VENTUNO Q viene presentata come compatibile con shield e carrier Arduino UNO, con i moduli Modulino, con i sensori Qwiic e addirittura con Raspberry Pi HATs.
Questo aspetto è importante perché amplia subito le possibilità di utilizzo: non una board isolata, ma una piattaforma che cerca di inserirsi in ambienti già familiari a maker, scuole, laboratori e sviluppatori. In ambito formativo questo può fare molta differenza, perché riduce la soglia di ingresso per sperimentare.
Connettività e interfacce per robotica ed Edge AI
Fra le caratteristiche che vengono evidenziate compaiono Wi-Fi 6, Bluetooth 5.3, CAN-FD nativo, PWM, GPIO ad alta velocità, connettori per più telecamere MIPI-CSI, audio avanzato, supporto display ed Ethernet 2.5 Gb. Interessantissimo, almeno per me la notizia che VENTUNO Q è ROS 2-ready, elemento che la colloca chiaramente anche nel perimetro della robotica moderna.
Nel complesso, la dotazione sembra andare oltre il classico uso educational di base e si spinge verso applicazioni più articolate: robot di servizio, sistemi di visione, automazione intelligente, interfacce vocali embedded, ispezione visiva e prototipazione preindustriale.
Alcuni scenari d’uso suggeriti da Arduino
Casi d’uso: interfacce vocali offline, sistemi interattivi basati su gesture, robot pick-and-place guidati dalla visione, robot di servizio che seguono le persone, applicazioni con Visual SLAM, monitoraggio intelligente e controllo qualità tramite modelli di visione locale.
Sono esempi significativi perché chiariscono il posizionamento del prodotto: VENTUNO Q non nasce come semplice variante di una board tradizionale, ma come piattaforma per progetti in cui servono insieme sensori, modelli AI, connettività e azione fisica sul mondo reale.
Perché potrebbe essere interessante anche per la scuola
Dal punto di vista didattico, VENTUNO Q potrebbe risultare particolarmente utile nei percorsi che incrociano elettronica, informatica, automazione, robotica e intelligenza artificiale. La presenza di un ambiente Linux, l’apertura verso Python e i workflow AI, unita al controllo real-time, la rende potenzialmente adatta a laboratori interdisciplinari più evoluti rispetto a quelli costruiti con microcontrollori tradizionali.
Naturalmente, molto dipenderà dalla disponibilità effettiva della scheda, dalla documentazione, dai costi, dagli esempi pronti e dalla facilità con cui queste caratteristiche potranno essere tradotte in attività scolastiche. Ma il segnale lanciato da Arduino è netto: l’AI embedded e la robotica intelligente stanno entrando sempre più chiaramente anche nel loro ecosistema.
Disponibilità
Arduino indica che VENTUNO Q sarà disponibile prossimamente tramite Arduino Store e presso rivenditori ufficiali come DigiKey, Farnell, Macfos, Mouser e RS. Al momento del lancio il prodotto è quindi annunciato come in arrivo, non ancora come board immediatamente acquistabile dal catalogo standard con una pagina e-commerce completa.
… cosa dire di più
sono curiosissimo ed impaziente di poterlo utilizzare 🙂
Con VENTUNO Q, Arduino sembra voler spingere il proprio ecosistema verso una nuova fascia progettuale: quella in cui non basta più leggere sensori e accendere attuatori, ma serve una piattaforma capace di analizzare, decidere e agire in locale. È un passaggio che guarda con decisione alla convergenza tra AI on-device, robotica e controllo embedded.
Resta ora da vedere come questa piattaforma si comporterà nella pratica, quali strumenti saranno davvero disponibili fin da subito e quanto sarà accessibile a scuole, maker e laboratori. Ma come annuncio, VENTUNO Q è sicuramente uno dei segnali più interessanti arrivati da Arduino negli ultimi tempi.
Fonte ufficiale Arduino: annuncio del 9 marzo 2026 sul blog Arduino e pagina prodotto ufficiale.
 Nella
Nella 


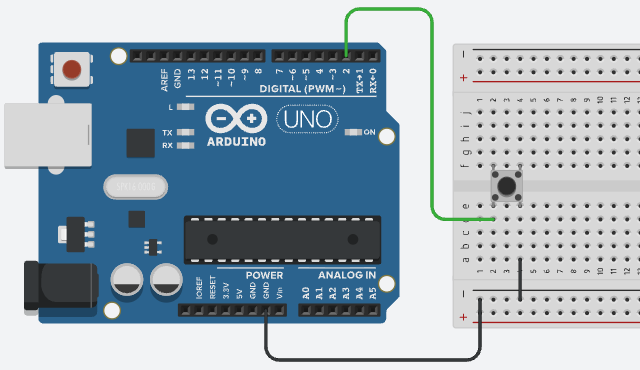
 Per chi lavora con Arduino da un po’ di tempo, prima o poi si imbatte in questa frase letta online:
Per chi lavora con Arduino da un po’ di tempo, prima o poi si imbatte in questa frase letta online: