
In questa lezione mostrerò uno sketch di esempio in cui la velocità, il senso di rotazione e la durata di rotazione vengono passati come parametri alle funzioni che controllano il movimento del robot. Ovviamente potrete modificare e migliorare l’esempio proposto.
Si tenga in conto che questo tipo di controllo, sia per la bassa qualità dei servomotori utilizzati, e sia per la scelta del tipo di motore, non consente una regolazione precisa, ma in ogni caso ci permette di raggiungere gli obiettivi esposti nella lezione 1.
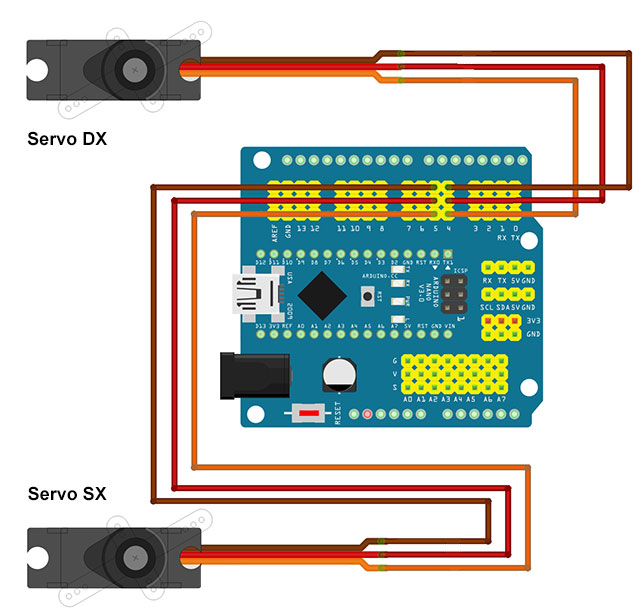
Lo schema di collegamento a cui farò riferimento sarà quello utilizzato nella lezione precedente, che indico di seguito.
L’inizializzazione dei servomotori viene eseguita nella stessa modalità come illustrato nella lezione 2.
Le funzioni principali di orientamento del robot permettono di controllare con discreta precisione:
- la velocità di rotazione;
- il senso di rotazione;
- il tempo di rotazione;
Le funzioni di controllo sono:
antiorarioRobot() orarioRobot() stopRobot()
Le tre funzioni al loro interno utilizzano il metodo write() sugli oggetti motoreDx e motoreSx.
Le funzioni prevedono due parametri di ingresso: velocità e durata della rotazione.
Con l’impostazione della velocità impostiamo anche il senso di rotazione. Nel caso di rotazione antioraria il valore dovrà essere compreso tra 90 e 180 ed il valore scelto stabilirà anche la velocità di rotazione.
La funzione antiorarioRobot() accetta due parametri di ingresso:
- velMaxAntioraria, massima velocità oraria
- durata, indica la durata della rotazione in millisecondi
in questo caso i valori inseriti per la velocità dovranno essere compresi tra 0 e 90:
void antiorarioRobot(int velMaxAntioraria, int durata) {
motoreDX.write(velMaxAntioraria); // Rotazione antioraria del motore DX
motoreSX.write(velMaxAntioraria); // Rotazione antioraria del motore SX
delay(durata); // durata: durata della rotazione
}
La funzione orarioRobot() funzionerà in modo simile:
void orarioRobot(int velMaxOraria, int durata) {
motoreDX.write(velMaxOraria); // Rotazione oraria del motore DX
motoreSX.write(velMaxOraria); // Rotazione oraria del motore SX
delay(durata); // durata: durata della rotazione
}
Come esercizio invito gli studenti a realizzare un’unica funzione di comando che ingloba le due precedenti in grado di realizzare qualsiasi tipo di movimento.
La funzione stopRobot() accetta come unico parametro la durata dello stop.
void stopRobot(int ferma) {
motoreDX.write(90); // Ferma il motore DX
motoreSX.write(90); // Ferma il motore SX
delay(ferma); // Durata dello stop
}
Lo sketch completo è il seguente:
/*
* Prof. Maffucci Michele
* SumoRobot
* Data: 26.01.2021
*
* Sketch 02: rotazione oraria e antioraria continua
* con funzioni parametrizzate
*
* Note:
* L'orientamento dei motori è fatto
* guardano il robot anteriormente
*
* 180: max velocità in senso antiorario
* 90 : servomotori fermi
* 0 : max velocità in senso orario
*
*/
// inclusione della libreria servo.h per il controllo dei servomotori
#include <Servo.h>
// Creazione oggetti servo
Servo motoreDX; // Inizializzazione del servomotore destro
Servo motoreSX; // Inizializzazione del servomotore sinistro
byte pinDx = 4; // Inizializza del pin 4 a cui è connesso il pin segnale del servo destro
byte pinSx = 5; // Inizializza del pin 5 a cui è connesso il pin segnale del servo sinistro
void setup() {
// attach() consente di definire a quale pin viene connesso il servomotore
// e lo collega all'oggetto che gestisce il servomotore
motoreDX.attach(pinDx); // pinDx collegato al motore destro
motoreSX.attach(pinSx); // pinSx collegato al motore sinistro
}
void loop() {
orarioRobot(30, 250); // Rotazione in senso orario del robot
stopRobot(3000); // Stop rotazione per un tempo fissato (vedere variabile ferma)
antiorarioRobot(150, 250); // Rotazione in senso antiorario del robot
stopRobot(3000); // Stop rotazione per un tempo fissato (vedere variabile ferma)
}
// rotazione del robot in senso antiorario
// velMaxOraria: velocità massima in senso antiorario
// durata: durata della rotazione
void antiorarioRobot(int velMaxAntioraria, int durata) {
motoreDX.write(velMaxAntioraria); // Rotazione antioraria del motore DX
motoreSX.write(velMaxAntioraria); // Rotazione antioraria del motore SX
delay(durata); // durata: durata della rotazione
}
// rotazione del robot in senso orario
// velMaxOraria: velocità massima in senso orario
// durata: durata della rotazione
void orarioRobot(int velMaxOraria, int durata) {
motoreDX.write(velMaxOraria); // Rotazione oraria del motore DX
motoreSX.write(velMaxOraria); // Rotazione oraria del motore SX
delay(durata); // durata: durata della rotazione
}
// stop del robot
// ferma: durata dello stop del robot
void stopRobot(int ferma) {
motoreDX.write(90); // Ferma il motore DX
motoreSX.write(90); // Ferma il motore SX
delay(ferma); // Durata dello stop
}
I tempi indicati inseriti nelle funzioni all’interno del loop potranno essere modificati secondo necessità.
Esercizio 01
Elenca le cause che provocano errori nel far ruotare precisamente di un determinato angolo scelto il robot.
Esercizio 02
Utilizzando un filo di connessione e modificando lo sketch precedente siete in grado di realizzare n sistema di START/STOP del robot.
Buon Coding a tutti 🙂