

Ho parlato di questo sensore di distanza quando qualche settimana fa mostrai come utilizzarlo con M5Stack mini: 5 min al giorno di sperimentazione con M5Stack mini – Sensore TOF seguendo il link trovate tutte le indicazioni sul principio di funzionamento ed una serie di dati tecnici che potrebbero essere utili per il vostro studio. Riprendo alcune parti del mio post in modo che le vostre sperimentazioni possano essere più agevoli:
…un sensore ToF (Time of Flight: tempo di volo) VL53L0X effettua un conteggio del tempo totale di volo dei fotoni dal momento in cui vengono emessi da un piccolissimo raggio laser al momento in cui viene rilevata la riflessione su un fotodiodo collocato sul sensore.
In generale il tempo di volo (spesso indicato con TOF, dall’inglese Time Of Flight) indica la misura del tempo impiegato da un oggetto, una particella o un’onda (elettromagnetica, acustica, elettromagnetica o di altro tipo) per percorrere una certa distanza in un mezzo determinato….
Il sensore ToF di cui dispongo è un VL53L0X che incorporato un emettitore Laser VCSEL ed un fotodiodiodo ricevitore SPAD. Il laser è in grado di emettere impulsi a 940 nm (prossimi al campo infrarosso). Il fotodiodiodo SPAD è estremamente sensibile al singolo fotone e grazie alla schermatura di cui è costituito riceve soltanto la lunghezza d’onda di 940 nm del laser.
Seguendo il link potete prelevare il datasheet del VL530X prodotto da ST.
Il sensore utilizzato con M5Stack mini è dotato di connettore GROVE, mentre la versione utilizzata per questo tutorial è una scheda breakout che potrete facilmente collegare ad Arduino.
Acquistai una serie di questi sensori per realizzare un sistema di rilevazione ostacoli di tipo laser per i kit robotici che faccio realizzare ai miei studenti, EduRobot e DotBot, ma poiché la situazione didattica di questi mesi è mutata drasticamente a causa dell’emergenza sanitaria, ho deciso di riutilizzare i sensori per un progetto semplice che iniziai qualche settimana fa: un bracciale per valutare la distanza tra le persone, sistema che per altro in diversi ambiti mi è stato chiesto di sviluppare.
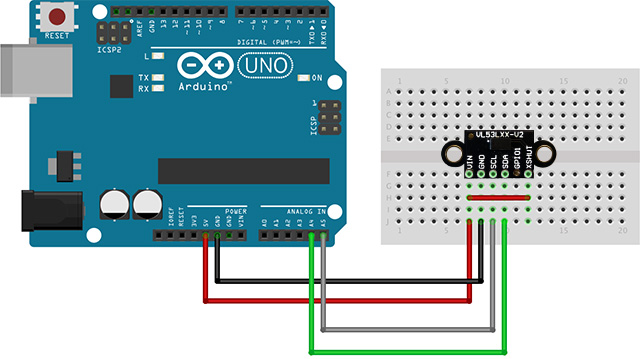
- Vin alimentazione del sensore, 3-5V. Collegate +5V di Arduino.
- GND da connettere al GND di Arduino
- SCL ed SDA dovranno essere connessi ai corrispondenti pin della scheda Arduino utilizzata, nel caso di un Arduino UNO R3 A5: SCL e A4: SDA
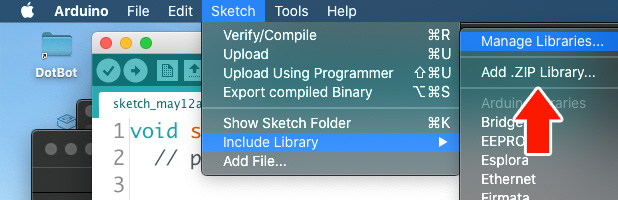
Installare la libreria Adafruit_VL53L0X Library Sketch > Include Library > Manage Libraries…:
Cercare la libreria Adafruit VL53L0X all’interno del motore di ricerca e procedere con l’installazione:

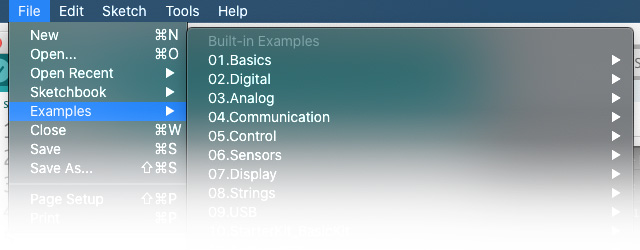
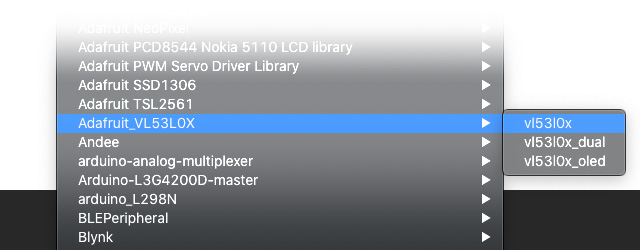
Aprire da File->Examples->Adafruit_VL53L0X->vl53l0x ed effettuare l’upload sulla scheda Arduino
Di seguito trovate gli sketch di esempio in cui ho effettuato alcune traduzioni:
#include "Adafruit_VL53L0X.h"
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(115200);
// per i dispositivi USB nativi, attende fino a quando la serial port non risulta disponibile
while (! Serial) {
delay(1);
}
Serial.println("Test Adafruit VL53L0X");
if (!lox.begin()) {
Serial.println(F("Impossibile avviare VL53L0X"));
while(1);
}
// power
Serial.println(F("VL53L0X API Esempio: misura distanza\n\n"));
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
Serial.print("Lettura misura... ");
lox.rangingTest(&measure, false); // se si inserisce 'true' si avvia la stampa dei dati di debug!
if (measure.RangeStatus != 4) { // dati errati
Serial.print("Distanza (mm): "); Serial.println(measure.RangeMilliMeter);
} else {
Serial.println(" fuori portata ");
}
delay(100);
}
Aprite serial monitor ed impostate la velocità a 115200 baud
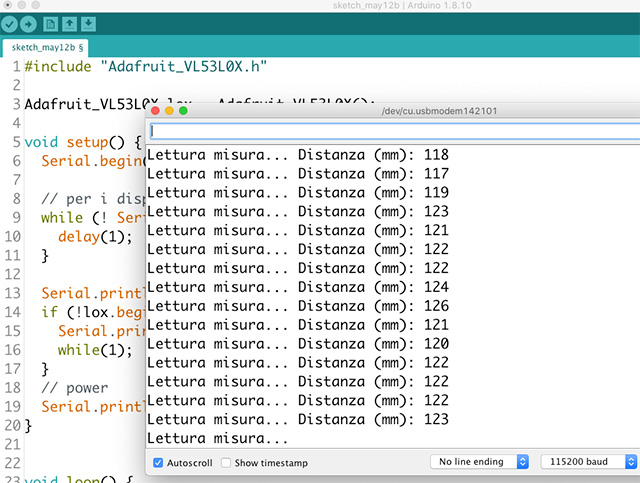
Muovete la vostra mano sul sensore per leggere la misura della distanza tra mano e sensore, noterete che quando non viene rilevato nulla sulla serial monitor verrà visualizzato il messaggio: out of range (fuori portata).
Modificare l’indirizzo assegnato al sensore
Durante l’inizializzazione, invece di usare la funzione lox.begin(), usare lox.begin(0x30) per impostare l’indirizzo su 0x30 sul nuovo sensore aggiunto, oppure in qualsiasi parte dello sketch, quando deve essere usato il sensore usare la funzione lox.setAddress(0x30).
Connessione di più sensori
Nel caso abbiate la necessità di connettere più sensori bisognerà che ognuno di essi abbia un indirizzo I2C diverso. L’indirizzo predefinito per VL53L0X è 0x29 ma è possibile modificarlo via software. Gli indirizzi che possono essere utilizzati vanno da 0x30 a 0x3F.
- Reset di tutti i sensori impostando i pin XSHUT a LOW per un tempo di 10 millisecondi.
- Mantenere il sensore 1 attivo mantenendo a HIGH il pin XSHUT a HIGH.
- Disattivare tutti gli altri sensori impostando i loro pin XSHUT a LOW
- Inizializzare il sensore 1 con lox.begin(nuovo_i2c_address). Scegliere qualsiasi indirizzo tranne 0x29, dovete scegliere un indirizzo inferiore a 0x7F, scegliere un indirizzo nell’intervallo 0x30 a 0x3F.
- Mantenere attivo il sensore n. 1 e disattivate il sensore n. 2 impostando il pin XSHUT ad HIGH.
- Inizializzare il sensore n. 2 usando la funzione lox.begin (nuovo_i2c_address). Scegliere qualsiasi indirizzo tranne 0x29, l’indirizzo da scegliere dovrà rientrare nel range ammesso (0x30 a 0x3F).
- Ripetere l’operazione per ciascun sensore, attivarli e assegnare ad ognuno un indirizzo diverso.
Attenzione che l’assegnazione dell’indirizzo non è permanente, in mancanza di alimentazione viene persa memoria dell’indirizzo assegnato a tutti i sensori, quindi la procedura deve essere ripetuta ogni volta che viene alimentato il circuito.
Nel caso abbiate un solo sensore l’indirizzo assegnato in automatico di default nel momento che date alimentazione è sempre 0x29.
Se operate con due sensori, per assegnare automaticamente gli indirizzi utilizzare lo sketch presente negli esempi che troverete all’interno della cartella della libreria Adafruit_VL53L0X: vl53l0X_dual
#include "Adafruit_VL53L0X.h"
// indirizzi assegnati se sono presenti due sensori
#define LOX1_ADDRESS 0x30
#define LOX2_ADDRESS 0x31
// impostazione dei pin per lo spegnimento dei sensori
#define SHT_LOX1 7
#define SHT_LOX2 6
// creazioni degli oggetti vl53l0x
Adafruit_VL53L0X lox1 = Adafruit_VL53L0X();
Adafruit_VL53L0X lox2 = Adafruit_VL53L0X();
// per memorizzare le misure
VL53L0X_RangingMeasurementData_t measure1;
VL53L0X_RangingMeasurementData_t measure2;
/*
- Il reset dei sensori viene fatto impostando tutti i pin XSHUT a LOW per 10 millisecondi 'delay(10)',
successivamente, per uscire dal reset tutti gli XSHUT vemgono posti ad HIGH.
- Mantiene il sensore 1 attivo mantenedo il pin XSHUT HIGH
- Tutti gli altri sensori vengono disattivati ponendo a LOW i pin XSHUT
- L'inizializzazione del sensore n.1 avviene con lox.begin(new_i2c_address). Scegliere qualsiasi diverso da 0x29 ed inferiore a 0x7F.
Scegliere un valore compreso tra 0x30 a 0x3F.
- Mantiene il sensore n.1 attivo e disattiva il sensore n.2 impostando il pin XSHUT ad HIGH.
- L'inizializzazione del sensore n.2 avviene con lox.begin (new_i2c_address). Scegliere qualsiasi diverso da 0x29 o da qualsiasi indirizzo impostato per l'altro ensore.
*/
void setID() {
// reset di tutti i sensori
digitalWrite(SHT_LOX1, LOW);
digitalWrite(SHT_LOX2, LOW);
delay(10);
// attivazione dei sensori
digitalWrite(SHT_LOX1, HIGH);
digitalWrite(SHT_LOX2, HIGH);
delay(10);
// attivazione di LOX1 e reset di LOX2
digitalWrite(SHT_LOX1, HIGH);
digitalWrite(SHT_LOX2, LOW);
// inizializzazione di LOX1
if(!lox1.begin(LOX1_ADDRESS)) {
Serial.println(F("Errore nell'avvio del primo VL53L0X"));
while(1);
}
delay(10);
// attivazione di LOX2
digitalWrite(SHT_LOX2, HIGH);
delay(10);
//inizializzazione di LOX2
if(!lox2.begin(LOX2_ADDRESS)) {
Serial.println(F("Errore nell'avvio del secondo VL53L0X"));
while(1);
}
}
void read_dual_sensors() {
lox1.rangingTest(&measure1, false); // se si inserisce 'true' si avvia la stampa dei dati di debug!
lox2.rangingTest(&measure2, false); // se si inserisce 'true' si avvia la stampa dei dati di debug!
// stampa la lettura dei dati del primo sensore
Serial.print("1: ");
if(measure1.RangeStatus != 4) { // se non si è fuori portata
Serial.print(measure1.RangeMilliMeter);
} else {
Serial.print("Fuori portata");
}
Serial.print(" ");
// stampa la lettura dei dati del secondo sensore
Serial.print("2: ");
if(measure2.RangeStatus != 4) {
Serial.print(measure2.RangeMilliMeter);
} else {
Serial.print("Fuori portata");
}
Serial.println();
}
void setup() {
Serial.begin(115200);
// per i dispositivi USB nativi, attende fino a quando la serial port non risulta disponibile
while (! Serial) { delay(1); }
pinMode(SHT_LOX1, OUTPUT);
pinMode(SHT_LOX2, OUTPUT);
Serial.println("Inizio spegnimento...");
digitalWrite(SHT_LOX1, LOW);
digitalWrite(SHT_LOX2, LOW);
Serial.println("Entrambi in modalità ripristino...(i pin sono a LOW)");
Serial.println("Avvio...");
setID();
}
void loop() {
read_dual_sensors();
delay(100);
}
Buon Making a tutti 🙂