Dal 14 al 25 novembre 2019 si svolgerà in Europa e in altre nazioni del mondo la nona Edizione della European Robotics Week, una manifestazione che vuole mettere in evidenza l’importanza e i vantaggi della robotica in ogni settore. Numerosi sono gli eventi organizzati anche in Italia uno degli appuntamenti fissi è quello che a Torino organizza il Fab Lab di Torino insieme al gruppo Robot Side e per tale occasione sono stato invitato come relatore il 24/11/2019 il mio intervento è previsto per le 16,30.
Poichè sono insegnante il mio talk sarà centrato sulla didattica della robotica, sulle sperimentazioni che svolgo con i miei allievi dell’ITIS G.B. Pininfarina di Moncalieri e con i docenti che seguono i miei corsi di formazione. Porterò con me le automazioni che utilizzo ogni giorno, i kit robotici costruiti per far didattica e parlerò di progetti in cantiere.
Condivido la scheda di lavoro per la realizzazione di un’attività di Coding con micro:bit che utilizzo durante i miei corsi di formazione per scuole medie ed elementari e durante la formazione per docenti. L’attività è stata sperimentata con allievi di quarta elementare. Attualmente sono in fase di preparazione schede di lavoro per studenti di 3′ media in cui scatolotto:bit diventa sensibile al tocco ciò viene realizzato mediante l’utilizzo di nastro di rame adesivo e inchiostro conduttivo.
L’obiettivo dell’attività è quello di utilizzare come sistema di input il giroscopio e l’accelerometro della scheda.
OBIETTIVO: realizziamo il nostro primo robot con una scatola e facciamolo reagire alle sollecitazioni esterne
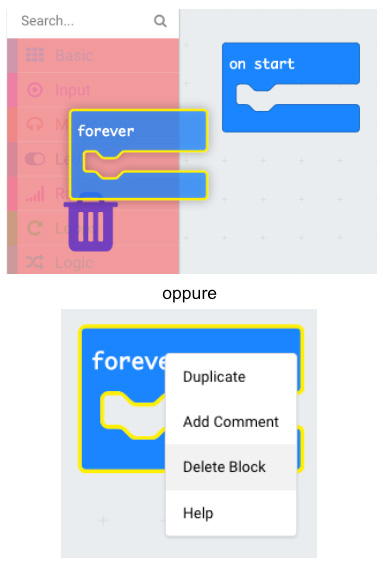
PASSO 1
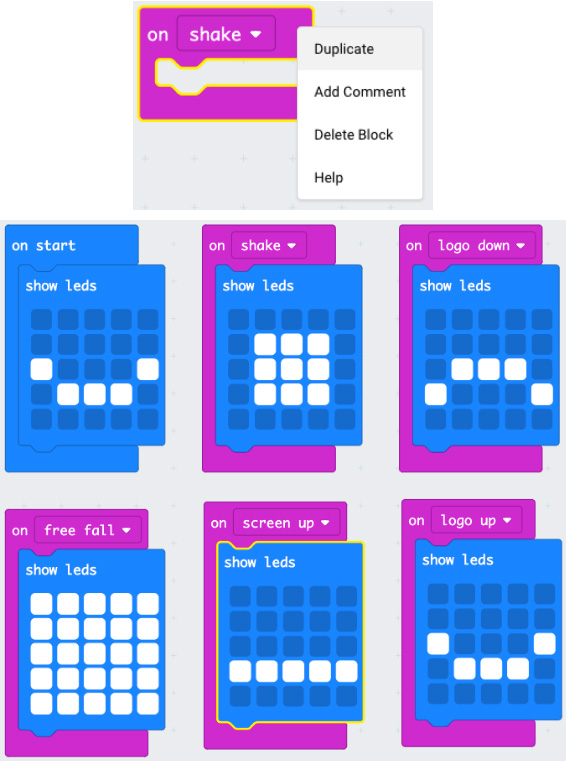
Cancellare l’istruzione forever trascinandola sulla sezioni istruzioni oppure click con tasto destro sull’istruzione e successivamente “Delete Block”
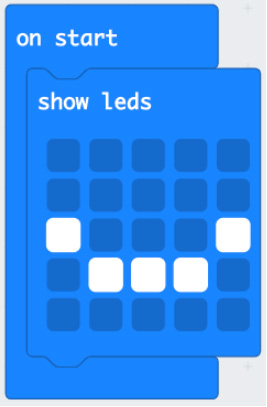
PASSO 2
Dalla sezione Basic selezionare l’istruzione “show leds” trascinatela nell’area di programma all’interno del blocco “on start” e disegnate una faccina che ride:
PASSO 3
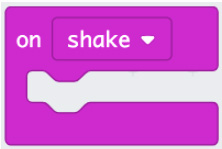
Dalla sezione Input selezionare l’istruzione “on shake” e trascinatela nell’area di programma
PASSO 4
Dupilcate quattro volte l’istruzione “on shake” e dal menù a discesa selezionate: “logo down”, “screen up”, “logo up”, “free fall” ed inserite all’interno di ciascuna il disegno di un quadrato, di una faccina triste, di una faccina indifferente, una faccina che ride ed un quadrato grande, così come appare nelle immagini che seguono:
PASSO 5
Fate click su Download per trasferire il programma sul micro:bit
PASSO 6
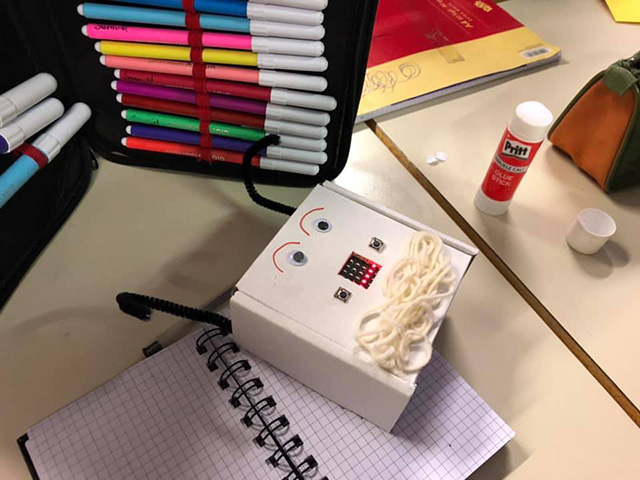
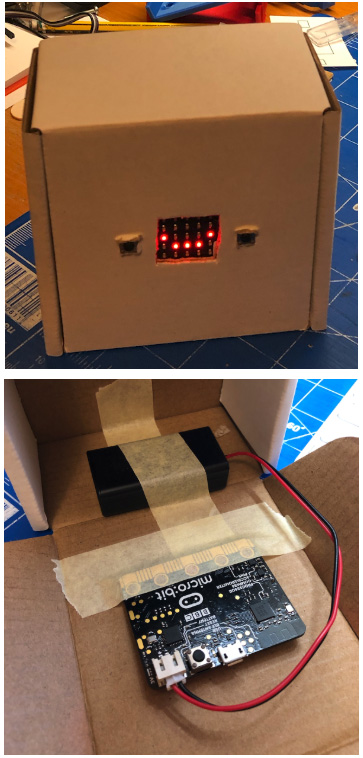
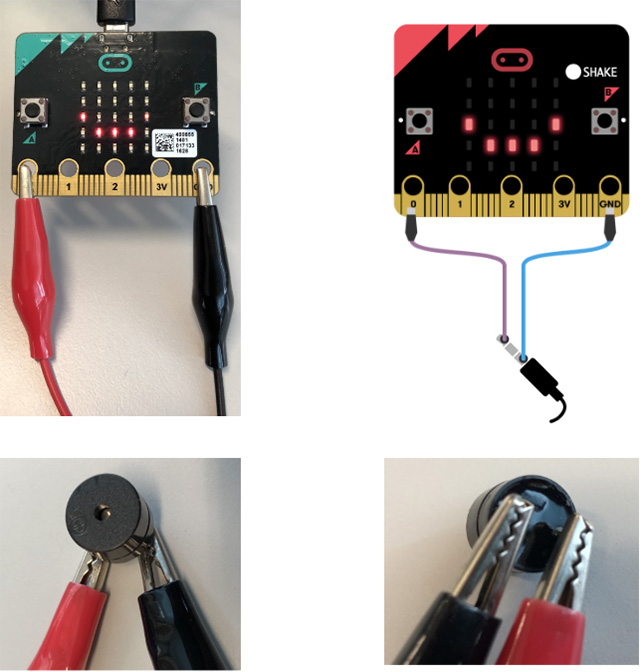
Inserite il micro:bit all’interno di una scatola e per rendere più stabile il tutto, con dello scotch fissate la batteria ed il microbit come indicato nell’immagine, fate attenzione a non incollare lo scotch sopra la scheda
PASSO 7
Collegate la batteria al micro:bit e provate a muovere il vostro piccolo robot. Ricordate di personalizzare il robot con colori oppure incollando oggetti, potreste ad esempio aggiungere delle braccia e delle gambe, oppure realizzare dei capelli con del filo di lana.
PASSO 8
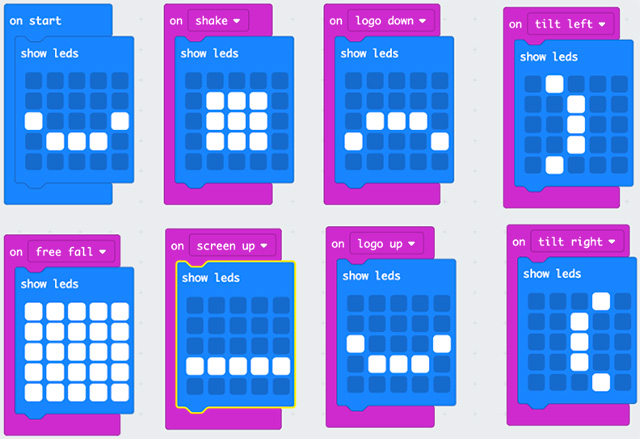
Aggiungiamo la funzione che aggiunge una faccina triste rivolta a destra e a sinistra quando il robot viene ruotato di 90° a destra o a sinistra. Al programma precedente aggiungere le istruzioni:
Programma completo
Proposte di esercizio
Prerequisiti
Aggiungere un piccolo altoparlante, in alternativa le cuffie del cellulare e collegarlo come riportato nell’immagine che segue tra il contatto 0 e il contatto GND del micro:bit
Esercizi
Far emettere una melodia musicale quando si avvia il micro:bit
Far emettere una nota musicale diversa per ogni posizione del micro:bit
Suggerimento
Per rendere più agevole l’utilizzo in classe, allego questa scheda di lavoro impaginata in formato PDF.
Innegabile, l’uso di Scratch interessa tantissimo, ne ho continuamente riscontro anche quando svolgo corsi in presenza. Appassionano tantissmo le nuove possibilità di connessione ai dispositi esterni: Lego Mindstorms Ev3, Lego WeDo 2.0, BBC micro:bit, MakeyMakey e molte delle domande che mi sono state fatte durante la passata edizione riguardavano l’interazione con questi kit didattici utilissimi per fare Coding e Robotica.
Ecco che la proposta di Tecnica della Scuola non si è fatta attendere e pertanto condurrò dalla prossima settimana un corso che ha i medesimi contenuti, però metterò ancor di più in evidenza le nuove caratteristiche di interattività con nuove proposte di sperimentazione.
Nel caso foste interessati si solgeranno 4 incontri in webinar di 2 ore ciascuno per un totale di 8 ore di formazione
Durante le attività di prove e registrazione della trasmissione ROB-O-COD negli studi televisivi di Rai Gulp ho portato con me la mio essere insegnante 🙂
Come sicuramente saprete il software di Lego di programmazione è un ottimo strumento, adatto per tutti gli studenti che incominciano a programmare, ma il confronto con gli allievi mi ha portato a consigliare la sperimentazione di altri linguaggi di programmazione da utilizzare con l’EV3. Ho ritenuto il caso di realizzare un post in cui segnalare alcune soluzioni, che vanno ad integrasi alle risorse già segnalate in un precedente articolo di qualche anno fa.
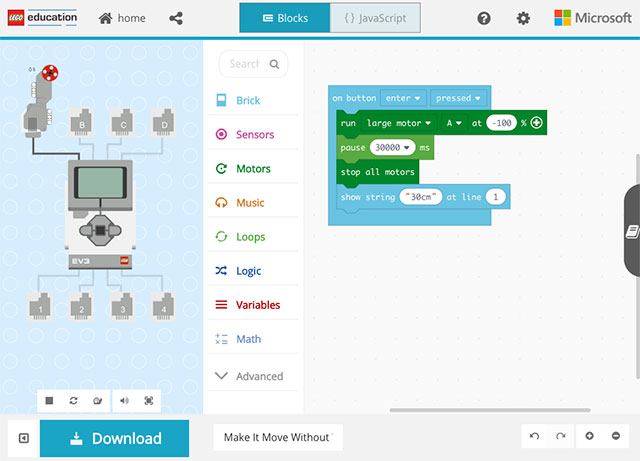
MakeCode Microsoft MakeCode è una piattaforma di programmazione online in grado di programmare l’EV3 e altri dispositivi elettronici, come ad esempio BBC micro:bit. MakeCode utilizza i blocchi grafici simili a quelli utilizzati in Scratch oppure la programmazione JavaScript.
Scratch Scratch è sicuramente tra i linguaggi di programmazione a livello didattico più conosciuti. Nell’ultima versione, Scratch 3, l’utilizzo dell’EV3 è pienamente integrato e supportato, trovate ulteriori informazione su questo sito. Per maggiori informazioni seguire anche il link: https://scratch.mit.edu/ev3. Poiché so che molti colleghi di scuola elementare utilizzano Lego WeDo e desiderano sperimentare attività di gara simili a quelle proposte in ROB-O-COD, vi rimando per maggiori informazioni alla pagina specifica di Scratch per l’uso di WeDo 2.0 https://scratch.mit.edu/wedo
Python for EV3 (segnalazione di Gianluca Cannalire) Programmare in Python su EV3 non è stato mai così semplice! Dal sito ufficiale Lego sarà sufficiente prelevare ed installare l’immagine MicroPython per EV3 su qualsiasi scheda micro SD, al riavvio del vostro Brick EV3 potrete immediatamente incominciare a programmare. Sul sito Lego documentazione completa con esempi.
LeJOS LeJOS (che si pronuncia come la parola spagnola “lejos” che tradotta in italiano è “lontano”) è una Java Virtual Machine che supporta Java. Con LeJOS potrete programmare EV3, NXT e RCX.
Bricx Command Center 3.3 (segnalazione di Maurizio Pelizzone) Bricx Command Center (BricxCC) è un IDE di programmazione open source, che permette la scrittura del programma, la compilazione e il trasferimento sul robot. L’IDE è gratuito e funziona su sistemi operativi Windows. BricxCC consente la scrittura in diversi linguaggi di programmazione tra i più noti l’NXC molto simile al C.
OpenRoberta Open Roberta è un linguaggio di programmazione gratuito, cloud-based (quindi non avrete necessità di installare nulla sul vostro computer), funziona trascinando in un’apposita area di programmazione dei blocchi funzionali (ricorda un po’ Scratch) e potrete programmare robot LEGO EV3 e NXT.
RobotC RobotC è un linguaggio di programmazione basato su C con un debugger software completamente integrato che supporta una vasta gamma di piattaforme hardware, potete utilizzarlo per Lego EV3, NXT, RCX. Sul sito di riferimento trovate moltissima documentazione.
Swift Playground Swift Playgrounds è un ambiente di sviluppo integrato solo per iPad progettato esclusivamente per imparare a programmare con il linguaggio di programmazione Swift. In Swift Playground, potrete programmare il vostro robot, raccogliere informazioni da sensori e azionare motori. Per gli insegnanti che volessero utilizzare questo linguaggio di programmazione ed avere delle sperimentazioni da far svolgere agli studenti vi consiglio il libro gratuito: LEGO MINDSTORMS EV3 Animal Rescue Teacher’s Guide
EV3Python EV3Python per tutti gli utenti che hanno dimestichezza con la programmazione in Python questa è una validissima soluzione per controllare vostro robot Lego Mindstorms EV3. Avrete necessità di utilizzare Microsoft Visual Studio Code
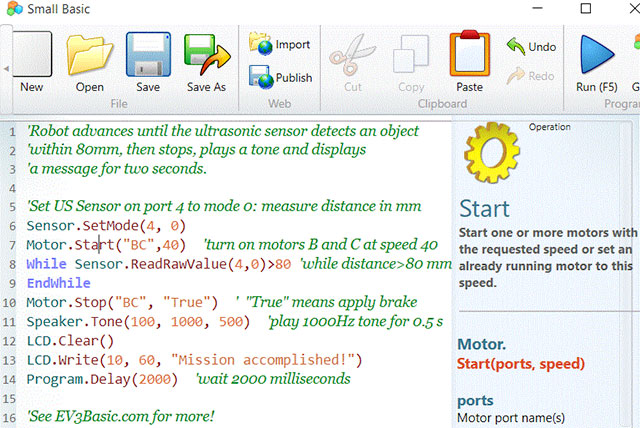
EV3 Basic EV3 Basic è un linguaggio di programmazione testuale gratuito che non richiede nessuna modifica del firmware Lego brick o dell’installazione di uno specifico sistema operativo da installare sul brick. Utilizza Microsoft Small Basic. EV3 Basic è compatibile con tutti i motori e sensori EV3 e NXT e dispositivi bluetooth e Wifi Lego compatibili. Small Basic è disponibile in 17 lingue e l’estensione EV3 è disponibile in inglese, tedesco, spagnolo e francese.
EV3dev EV3dev non è un linguaggio di programmazione, ma un sistema operativo basato su Linux Debian in grado di eseguire programmi realizzati con moltissimi linguaggi di programmazione inclusi C ++, Node.js e Python. Sul sito di riferimento trovate moltissime guide.
CoderZ CoderZ ambiente di simulazione 3D per robot EV3. La programmazione può essere fatta con Blockly o Java. CoderZ è un prodotto commerciale e viene offerta la possibilità di utilizzarlo in prova per 14 giorni.
LabVIEW
LabVIEW per LEGO MINDSTORMS (LVLM) e LabVIEW for Education (LV4E) sono ambienti di programmazione visuali. Il software di programmazione grafica standard di di Lego è stato realizzato usando LabVIEW, quindi LVLM rappresenta forse il passo successivo, soprattutto se state operando con studenti dei primi anni delle superiori. Troverete un’ambiente di sviluppo estremamente potente e versatile.
Come ebbi modo di scrivere qualche tempo fa su Facebook, pur essendo docente di scuola superiore ho avuto la fortuna di insegnare a studenti e insegnanti di ogni ordine di scuola. Ogni nuova attività di formazione mi offre la possibilità di sperimentare tecnologie e modalità di comunicazione che poi se efficaci assemblo per costruire gli strumenti per le future lezioni.
Credo che uno dei momenti più ricchi per la mia formazione sia stata quella derivante dalle attività di laboratorio con gli studenti di scuola elementare, la loro creatività, il loro stupirsi ed il loro punto di vista richiede una progettazione completamente diversa da quella con allievi di scuola superiore.
In questi mesi sto dedicando alcune ore pomeridiane alla formazione di studenti di 4 elementare, gli obiettivi sono quelli che amo di più: Coding e Robotica.
Gli strumenti che utilizziamo sono molti: carta, matite, BBC micro:bit, Lego WeDo e anche Lego Mindstorms EV3 e proprio su quest’ultima tecnologia, anche se non ne era stato programmato l’utilizzo, ho avuto forte richiesta da parte degli studenti da quando, per aumentare il loro interesse nelle attività proposte, ho dato notizia della trasmissione ROB-O-COD:
“MICHELE anche noi vogliamo partecipare! Costruiamo i campi, con il cartone e facciamo noi i mondi e ci insegni!”
Ora come rispondere a questa necessità?
Ai bambini bisogna rispondere! 🙂
La trasmissione ha un traget per ragazzi di scuola media con l’uso di tecnologie non proprio adatte ai più piccoli delle scuole elementari…
pensare pensare e ripensare…
Di seguito vi condivido una primissima bozza di attività da perfezionare, per velocità di scrittura inserisco direttamente quanto scritto nei miei appunti su Evernote spero che queste idee possano servire anche ad altri:
Bozza di progetto:
vediamo la prima puntata di ROB-O-COD in classe, al termine ne faccio nascere un confronto tra gli allievi per immaginare attività di gara e modalità di costruzione campi e robot.
I campi gara avranno una forma geometrica particolare (nota per il lettore: non ne posso parlare in questo post per non svelare troppe cose ma potreste intuire la forma dei tavoli dalla grafica della trasmissione 😉 ).
Spiego come costruire su carta questa specifica forma geometrica.
Con le dimensioni reali usate per realizzare i campi gara in trasmissione, replichiamo la forma con dello nastro di carta posto sul pavimento dell’aula, all’interno del perimetro dovranno gareggiare i robot programmati dai bambini.
Le dinamiche di gioco saranno molto simili a quelle della trasmissione: presenza di un pubblico, di tecno-disturbatori che dovranno creare difficoltà alla movimentazione dei robot, ecc…
Tecnologia dei robot: primo girone realizzazione di robot basati su BBC micro:bit la cui struttura sarà di cartone, secondo girone robot realizzati con Lego WeDo. I primi classificati potranno utilizzare il Lego Mindstorms EV3 messo a disposizione del Prof. (Io) per realizzare una gara su un singolo campo di gioco.
Scrivere le storie. Le storie potranno essere realizzate prendendo spunto da quanto proposto di giorno in giorno nella trasmissione oppure inventate dagli studenti (valutare attività da far svolgere durante le attività al mattino).
Come realizzare la scenografia? Scatole di cartone, bottiglie e bicchieri di plastica, mattoncini Lego.
Cercherò nelle prossime settimane condividere una versione aggiornata dell’attività. L’intero percorso sarà presentato ad un gruppo di insegnanti durante l’evento di Coding e Robotica per scuole medie organizzato dall’IIS Vallauri di Fossano il prossimo 6 giugno.