Da diverso tempo mi sto occupando di didattica con BBC micro:bit, una splendida scheda elettronica progettata appositamente per fare Coding a scuola, ben si adatta per studenti di scuola elementare, media e primi anni delle superiori. Su questo sito come saprete ho raccolto in una sezione specifica lezioni e sperimentazioni. Recentemente è stato aggiunto a Scratch, come segnalato in qualche tempo fa, il supporto a micro:bit quindi a livello didattico si potrebbero implementare percorsi interessanti che partono da Scratch, passano per JavaScript Blocks Editor per poi giungere a MicroPython.
Dal mio punto di vista MicroPython è il trampolino di lancio che mi permetterà di aggiungere sperimentazioni di automazione con microcontrollori, un modo naturale per realizzare continuità dal secondo anno dell’ITIS al terzo/quarto anno poi. Ovviamente non solo MicroPython, tanto C anche con Arduino, ma è essenziale per me aggiungere anche questa competenza.
MicroPython è una reinterpretazione di Python 3 per microcontrollori e sistemi embedded, inoltre Python è uno dei linguaggi di programmazione più belli, ottimo per la didattica ed averlo anche su sistemi elettronici rende incredibilmente divertente ed efficiente lo sviluppo di sistemi di controllo.
Per seguire queste brevi lezioni non bisogna essere professionisti nella programmazione di Python (anche io non programmo spesso in questo linguaggio) il percorso parte da un livello 0. Il mio obiettivo è quello di fornire uno strumento che poi invogli alla sperimentazione.
La documentazione è pensata per studenti ed insegnanti di ogni ordine e grado.
MicroPython non vuol dire solo micro:bit ma anche PyBoard, ESP8266/ESP 32 e molto altro.
Pertanto ho pensato di realizzare, nel limite del tempo didattico che posso dedicare a queste piattaforme un corso introduttivo, didascalico e spero semplice. Ciò che scriverò sarà indirizzato all’uso di micro:bit, ma con qualche impostazione iniziale, tutto si adatta benissimo anche alle altre piattaforme.
Da dove incominciare?
Nei link indicati sopra trovate i riferimenti essenziali, ma un libro fondamentale è: Programming with MicroPython – by Nicholas Tollervey and pyboard lite il link rimanda ad amazon.it, l’acquisto può essere fatto anche con la 18app o con la carta del docente.

Tutto il percorso si basa sull’ottimo lavoro realizzato da Mike Rowbitt con First Steps with MicroPython ne ho fatto in parte una traduzione ed in parte ho aggiunto altri argomenti ed esercizi.
Per essere informati sulle nuove versioni del manuale in lingua inglese sviluppato da Mike Rowbitt potete iscrivervi alla mailing list: microbit@python.org
(https://mail.python.org/mailman/listinfo/microbit).
Le mie lezioni sono in costruzione, conto di pubblicare almeno un paio di guide alla settimana in modo che per chi vorrà potrà prendere questi appunti reinterpretarli secondo le proprie necessità e realizzare un percorso nella seconda parte dell’anno scolastico.
I progetti e gli esercizi sviluppati in MicroPython su BBC micro:bit fanno uso di:
Mu – un semplice editor di codice, credo che sia il modo più semplice per incominciare a programmare in MicroPython su BBC micro:bit.
Vi invito quindi a scaricare l’editor “mu” per poter lavorare con le lezioni proposte.
Tutte le istruzioni per il download e l’installazione potete trovarle sul sito di riferimento, sono ben fatte e di facile comprensione.
Mu funziona con Windows, OSX and Linux (anche Raspberry Pi).
L’ultima versione di Mu vi permette di selezionare mediante il pulsante “Modes” la modalità di programmazione in funzione della piattaforma: Adafruit CircuitPython, BBC micro:bit, Pygame Zero, Python 3.
Una volta installato Mu selezionate il modo micro:bit, collegate il vostro micro:bit al computer tramite un cavo USB.
Il processo di scrittura è upload su micro:bit richiede pochi passaggi:
- scrivete il vostro script nella finestra dell’editor
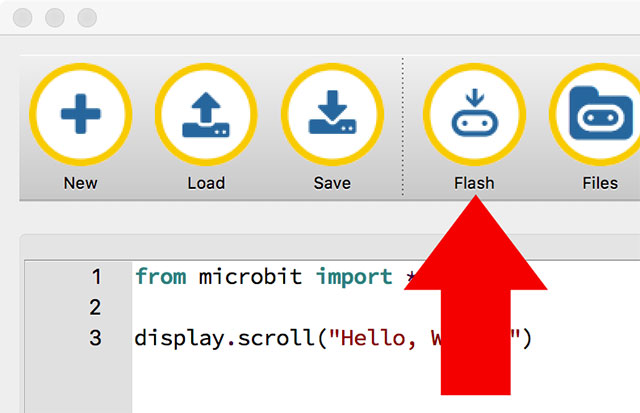
- fate click sul pulsante “Flash” per trasferire il programma sul micro:bit.
- se il trasferimento non avviene, assicurati che il vostro micro:bit appaia come periferica USB nel vostro file system.
Faremo queste operazioni tra breve scrivendo un semplicissimo programma.
Prima di andare oltre un richiamo sulle caratteristiche del micro:bit riprese dal corso introduttivo che trovate su questo sito.
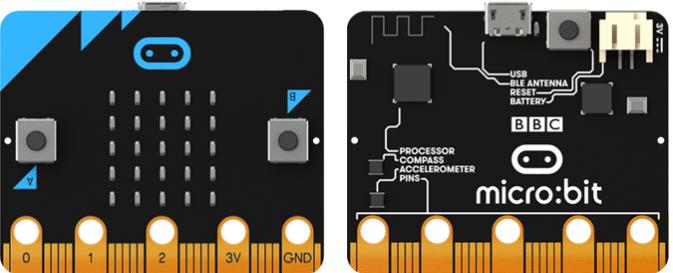
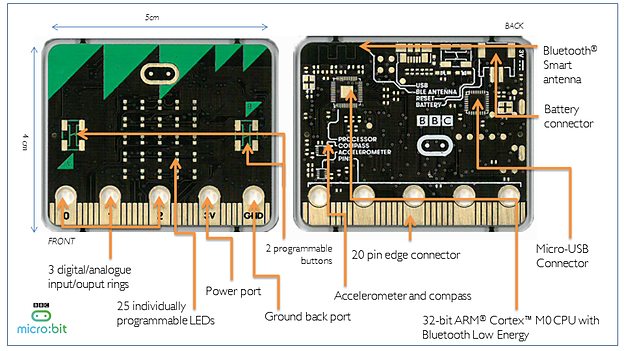
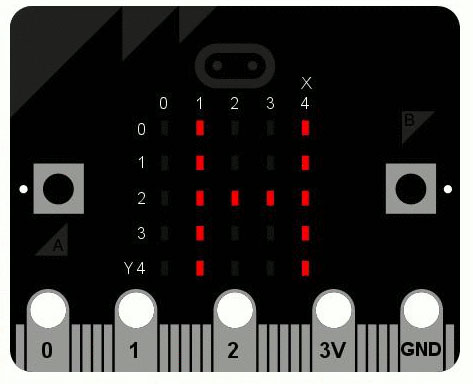
La scheda BBC micro:bit è costituita da:
- 25 LED rossi che possono essere utilizzati per comporre un testo o una icona stilizzata.
- Due pulsanti programmabili (A e B) che possono essere utilizzati per dire a micro:bit quando si avvia o si interrompe un’operazione.
- Un sensore di temperatura per rilevare la temperatura ambiente.
- Un sensore di luce per rilevare le variazioni di luminosità ambientale.
- Un accelerometro per rilevare un movimento.
- Un magnetometro per rilevare la direzione del campo magnetico.
- Connessione Radio e Bluetooth Low Energy per interagire con altri device.
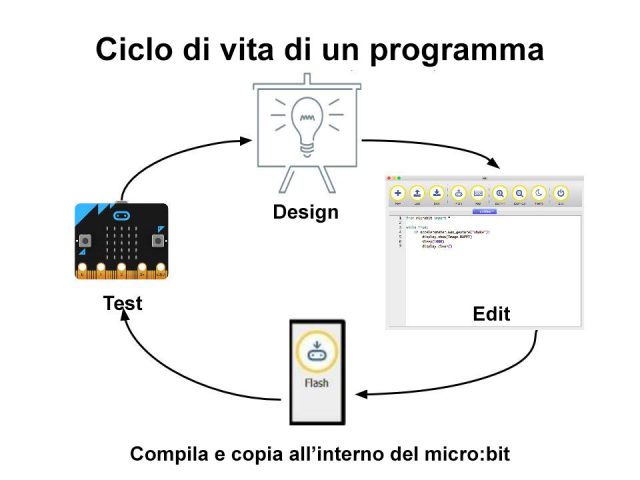
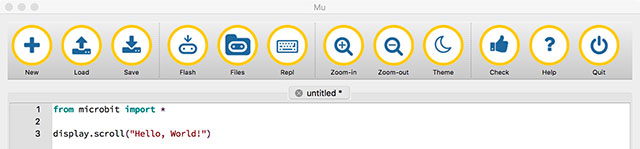
Il primo programma – “Hello World!”
E’ possibile pensare al Coding con micro:bit come ad un ciclo costituito fa 4 fasi:
Il modo tradizionale per iniziare a programmare in una nuova lingua di programmazione è quello di far dire al computer “Hello, World!”.
Fare questo è semplice in MicroPython:
from microbit import *
display.scroll("Hello, World!")
Analizziamo le due linee di codice.
La prima linea:
from microbit import *
Nella prima riga viene richiesto a MicroPython tutto il materiale (codice) necessario per lavorare con micro:bit. Il codice richiesto è un modulo chiamato microbit (un modulo è una libreria di codice preesistente). Quando fate l’import (importate qualcosa), state dicendo a MicroPython che volete usarlo, “*” è il modo in cui Python dice tutto.
Quindi from microbit import * significa, in inglese, “Voglio poter usare tutto ciò che è disponibile dalla libreria di codici microbit”.
Seconda linea:
display.scroll(“Hello, World!”)
dice a MicroPython di usare il display per far scorrere la stringa di caratteri.
La parte di codice display permette la visualizzazione del testo Hello, World! .
display è un oggetto dal modulo microbit che rappresenta la visualizzazione fisica del testo “Hello, World!” sul dispositivo.
La parte di codice indicata con display è un object (oggetto) del modulo microbit che rappresenta il display fisico. Possiamo dire al display di eseguire l’operazione indicata fino al . dopo il . è presente qualcosa di molto simile ad un comando (che chiameremo metodo). In questo caso stiamo usando il metodo scroll (scorrimento). Poiché scroll ha necessità di sapere quali caratteri far scorrere sul display fisico, questi saranno specificati tra doppie virgolette (“) tra parentesi ( ( e ) ). Tutto ciò che è tra parentesi e tra le virgolette prende il nome di argomento. Quindi, display.scroll(“Hello, World!”) significa, in inglese, “Voglio che tu usi il display per far scorrere il testo ‘Hello, World!'”. Se un metodo non ha bisogno di argomenti non inseriremo nulla tra parentesi: () .
Copiate all’interno dell’editor il codice “Hello, World!” ed eseguite l’upload sul vostro BBC micro:bit.
Siete in grado di capire come cambiare messaggio?
Potete farlo salutare? Ad esempio, potreste far dire “Ciao, Michele!”.
Suggerimento: è necessario modificare l’argomento del metodo di scroll. 🙂
Avvertimento
Potrebbe non funzionare 🙂
Nel caso in cui venga commesso un errore MicroPython ci viene in aiuto, in questo caso scorrerà sul display del micro:bit un messaggio di errore, sempre sul display apparirà il numero della linea di codice in cui è presente l’errore.
Python si aspetta che voi digitiate ESATTAMENTE il codice. Quindi, ad esempio l’istanza, Microbit , microbit e microBit sono tutte cose diverse per Python. Se MicroPython restituisce un errore NameError , probabilmente avete digitato qualcosa in modo non corretto.
Se MicroPython restituisce un SyntaxError probabilmente avete scritto qualcosa che MicroPython non riesce a capire. Verificate che non manchino ad esempio i caratteri speciali “ o : .
Usiamo Mu
Colleghiamo il micro:bit al computer:
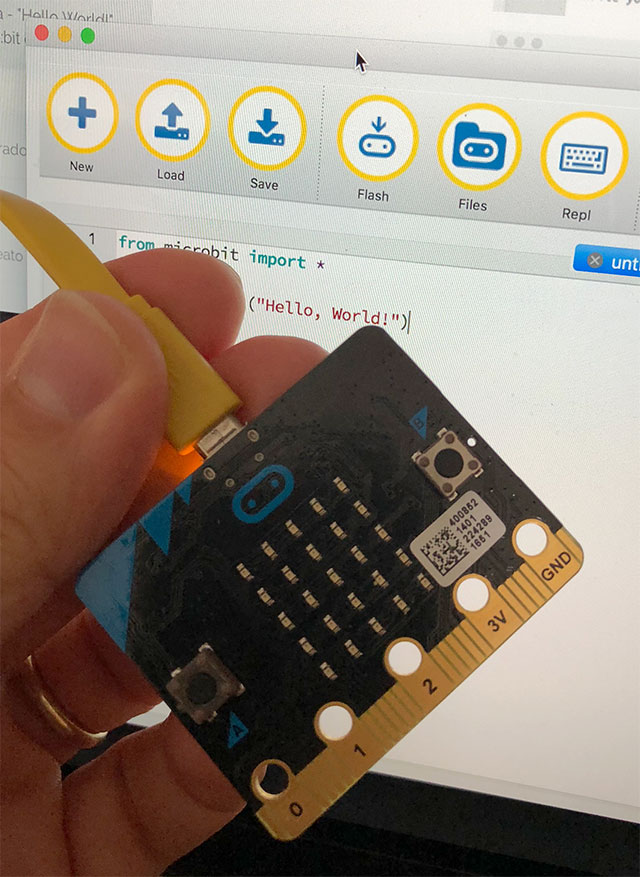
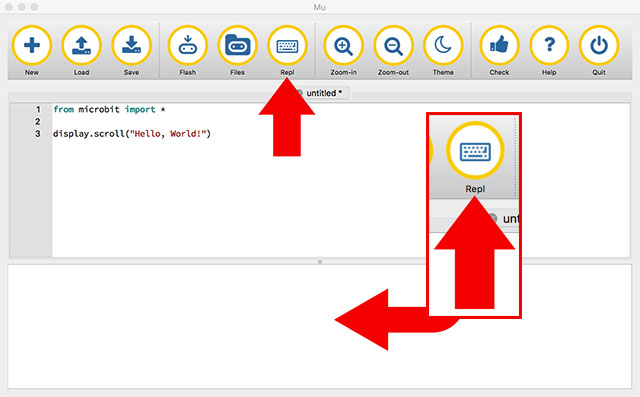
Utilizziamo Mu per codificare:
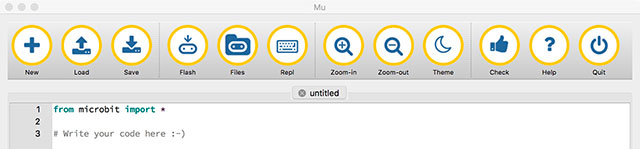
Un click sul pulsante Repl per estendere la finiestra di editing e visualizzare l’area in cui vengono mostrati i messaggi inviati dal micro:bit
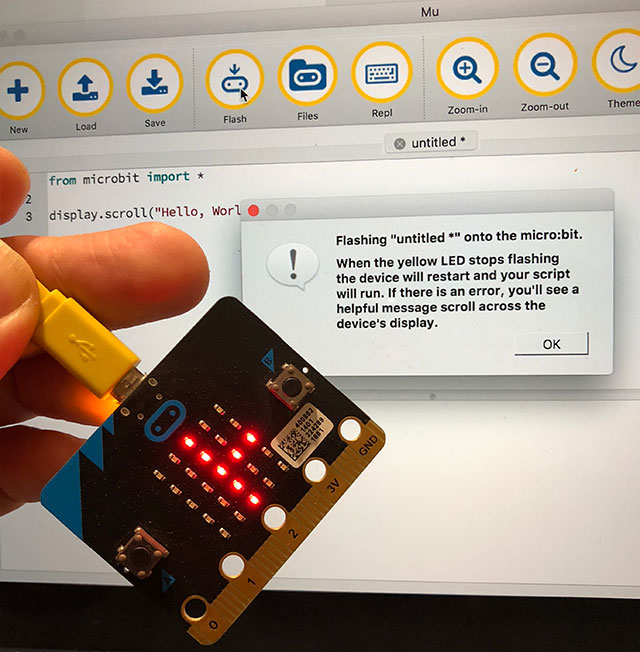
Per trasferire il programma sul micro:bit click sul pulsante “Flash”:
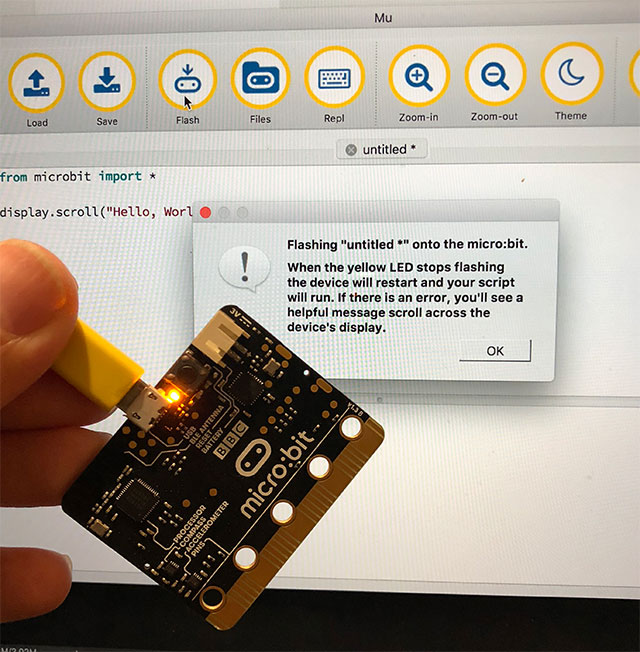
Durante la fase di trasferimento del programma il led giallo di stato incomincia a lampeggiare al termine il micro:bit verrà disconnesso dal computer ed immediatamente il programma incomincerà a funzionare:
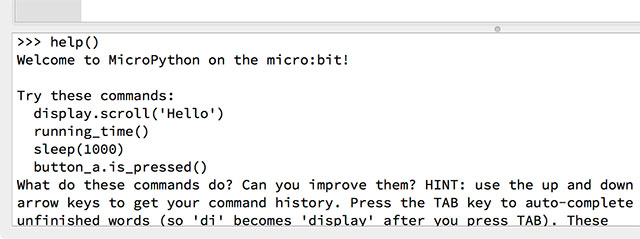
Nel caso in cui nel vostro programma sia presente un errore, nella parte bassa della finestra di editing vi verrà restituito un messaggio che indica il tipo di errore. Usando il comando help() potrete consultare una guida che vi aiuterà a risolvere il problema.
Nel caso di errore sul display del micro:bit apparirà il messaggio di errore.
Buon Coding a tutti 🙂