L’IDE di programmazione Arduino è notoriamente semplice da utilizzare, possiede le funzionalità minime per poter scrivere, compilare e caricare sulla scheda il codice prodotto, però le operazioni messe a disposizione sono minime e solamente nella versione che è stata presentata durante la scorsa MakerFaire di Roma, di cui avevo dato notizia in un precedente post, sono state aggiunte una serie di funzionalità di editing che tendono a farlo diventare un editor di programmazione professionale.
Attualmente il nuovo IDE è ancora in versione Beta quindi si dovrà attendere qualche tempo.
Esistono molti ambienti di sviluppo professionali che aggiungono modalità di autocompletamento, facile accesso ad ogni parte del codice, numerose scorciatoie da tastiera. Tra gli abbienti più diffusi che farò sicuramente utilizzare ai miei studenti vi è Visual Studio Code di Microsoft che con l’estensione Platform IO, sviluppato in Python, fornisce un set di strumenti di nuova generazione per lo sviluppo di sistemi embedded in C / C ++. L’estensione è gratuita ed Open Source.
Le schede supportate sono moltissime, ad oggi sono 769, tra cui ESP32, ESP8266, schede della famiglia ST Nucleo e tutte le schede della famiglia Arduino.
Platform IO può essere eseguito su Windows, Mac e Linux e su piccoli computer basati su architettura ARM come: Raspberry Pi, BeagleBone, CubieBoard, Samsung ARTIK, ecc. Platform IO viene fornito con numerosi esempi e librerie.
Vantaggi
- completamento automatico del codice C / C ++
- Smart Code Linter che non è presente nell’IDE Arduino.
- Supporto del tema scuro e chiaro
- Smart Code Navigations
- Formattazione del Codice
- Cross-platform build system indipendente dal sistema operativo
- File Explorer che aiuta organizzare i file.
- Comodo gestore delle librerie, Serial Monitor evoluto e molto altro.
L’uso di PlatformIO è molto semplice e richiede pochi passaggi per l’installazione.
Installazione
Dal sito di riferimento: https://platformio.org/
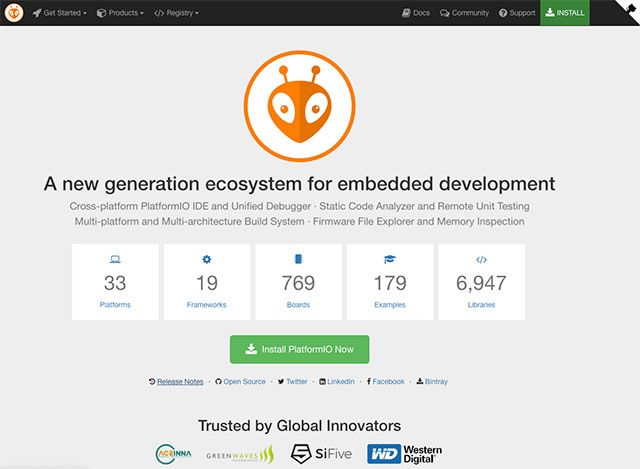
far click su “install PlatformIO Now”
Sarete reindirizzati sulla pagina di riferimento di PlatfprmIO IDE
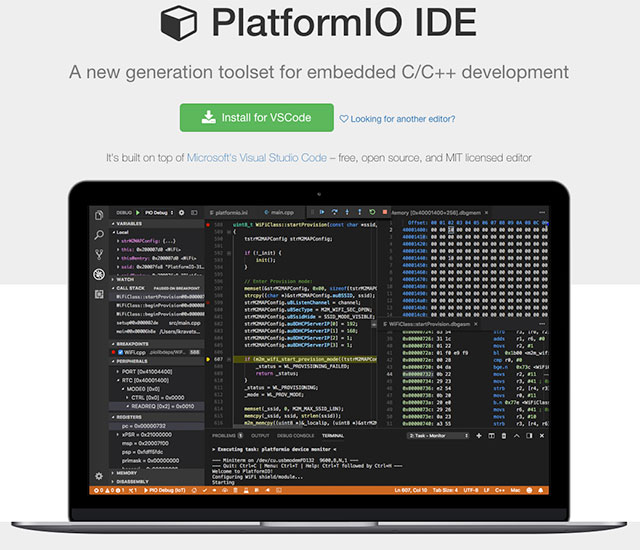
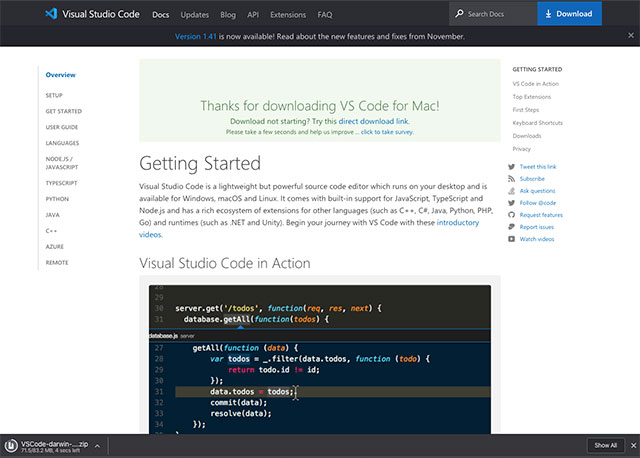
Prelevare Visual Studio Code facendo click su “Install for VSCode”, sarete reindirizzati sulla pagina di riferimento. Selezionate il sistema operativo del vostro computer e fate click su Download:
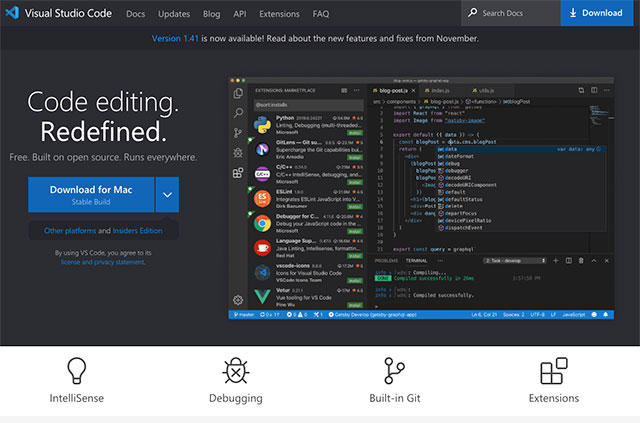
Durante il download sarete reindirizzati su una pagina che mostra le caratteristiche principali di VSCCode
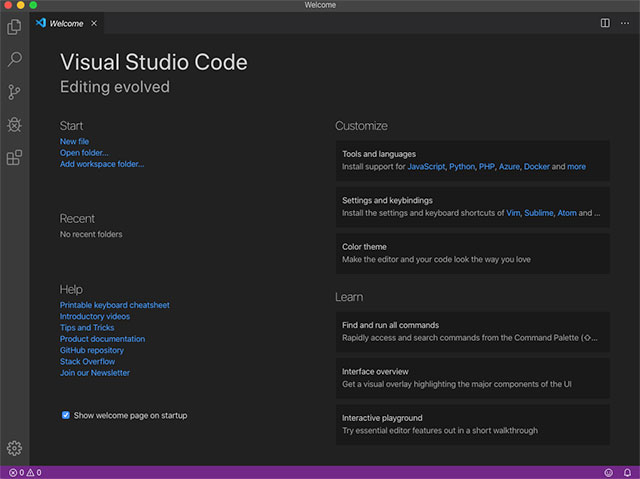
Non sono necessarie installazioni, è sufficiente un doppio click per avviare l’applicazione:
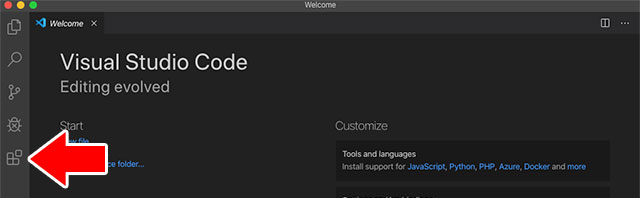
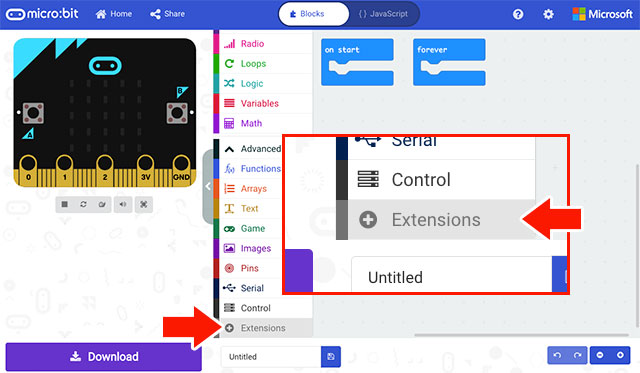
Selezionate l’icona Extensions (5’ icona)
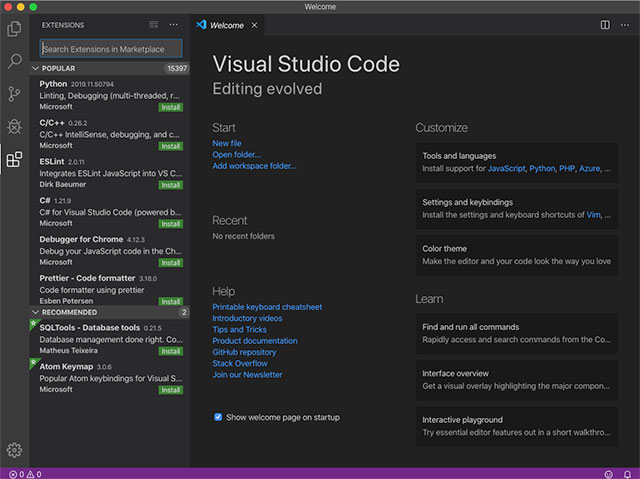
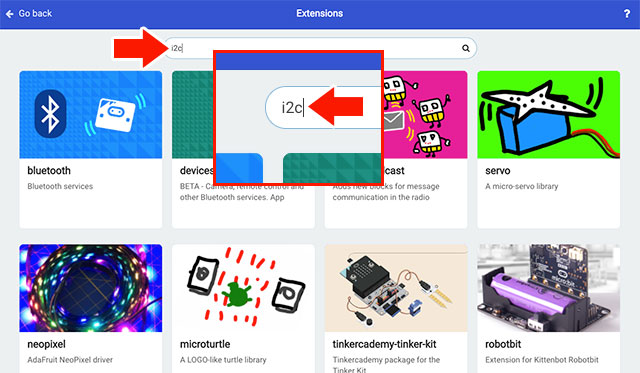
Inserite nel campo di ricerca Platform IO e troverete immediatamente l’estensione, come potete immediatamente notare VSCode può essere utilizzato per programmare anche in altri linguaggi: C/C++, C#, Python, PHP, Go, JavaScript, TypeScript, Node.js e molti altri.
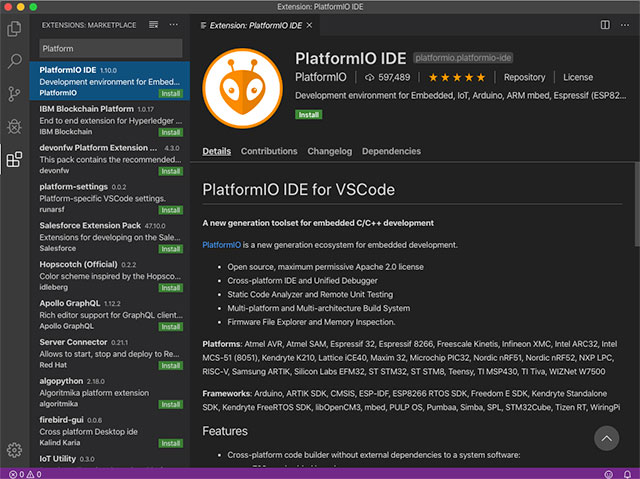
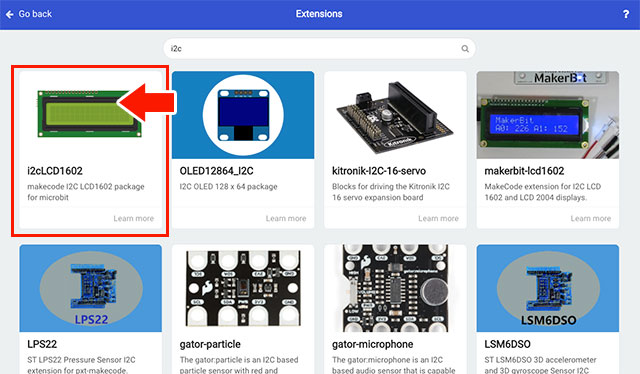
Click su Install per installare l’estensione.
La fase di installazione durerà qualche minuto ed in questa fase non chiudete la finestra.
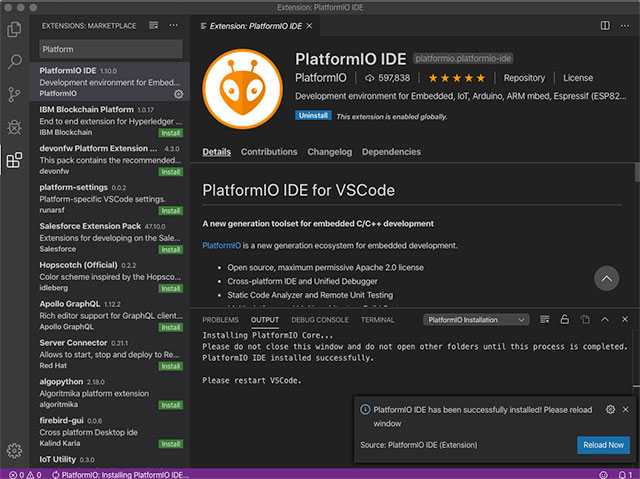
Sulla destra della finestra apparirà un messaggio che vi avverte che l’installazione è andata a buon fine, fate click su “Reload Now”

Quando l’installazione è terminata vedrete la seguente interfaccia:
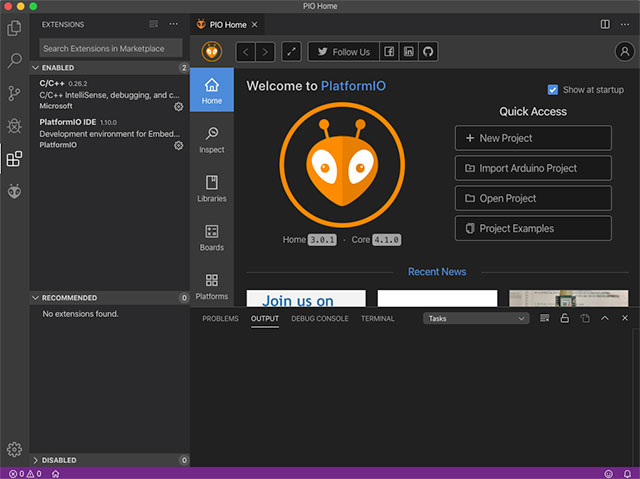
Vi consiglio di riavviare VS Code Editor dopo l’installazione di Platform IO.
Ciò completa la fase di installazione di Platform IO ed è pronto per essere usato.
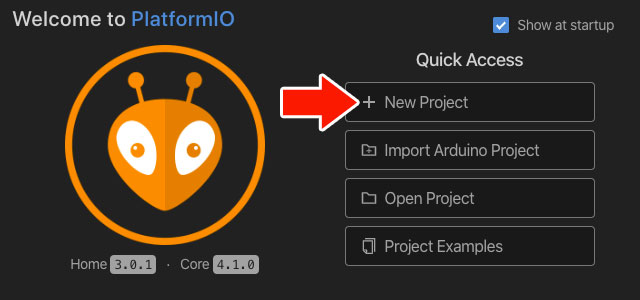
Realizziamo il primo Sketch ed inizieremo con il solito Blink che scriveremo all’interno di Platform IO.
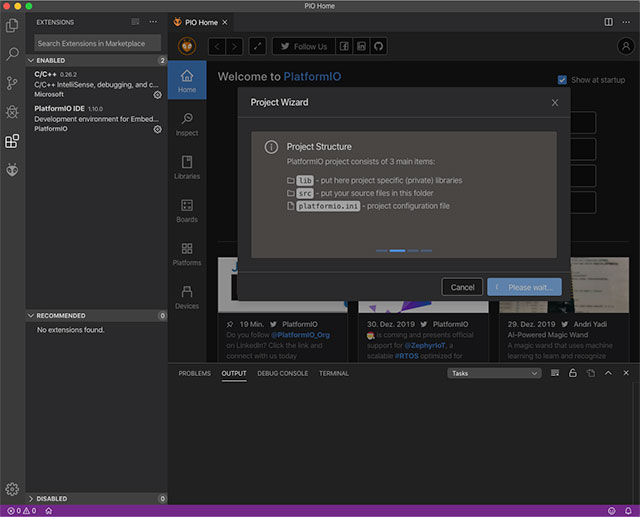
Fate click su “+ New Project”
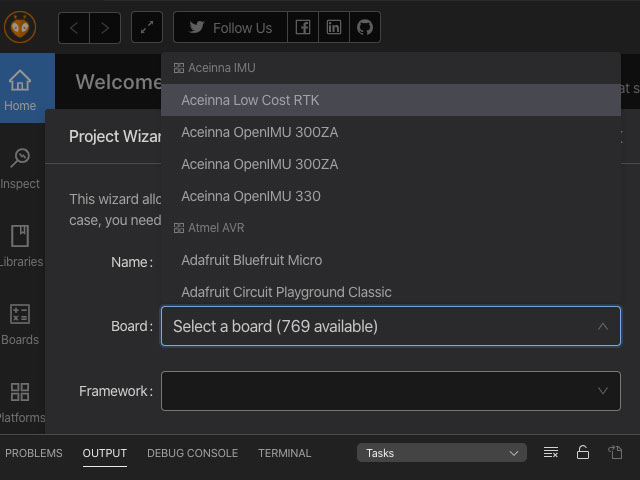
Apparirà una finestra in cui dovrete inserire il nome del programma, nel mio caso ho scelto: “blink-PIO”, selezionate poi il tipo di scheda, noterete che mentre scrivete il nome della scheda vi verrà fornito il suggerimento per il completamento, selezionate Arduino Uno, il campo “Framework” viene completato automaticamente:
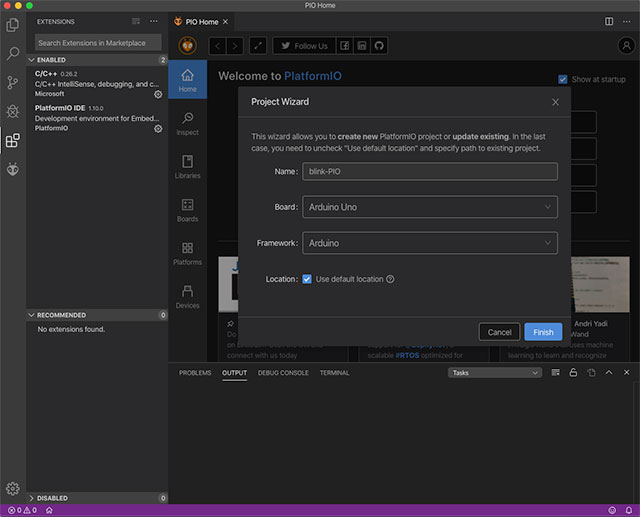
Il progetto necessita di qualche secondo, giusto il tempo per creare risorse e dipendenze file.
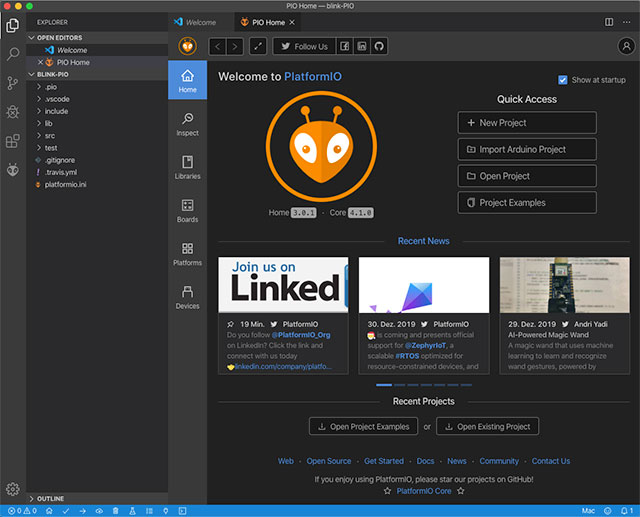
Al termine apparirà la pagina di riferimento del progetto:
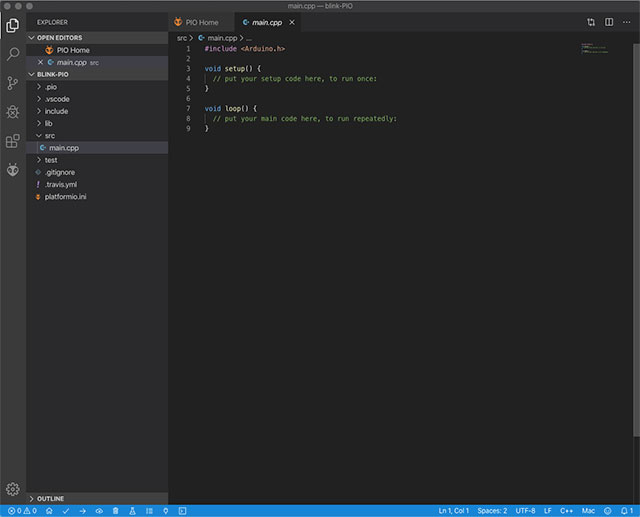
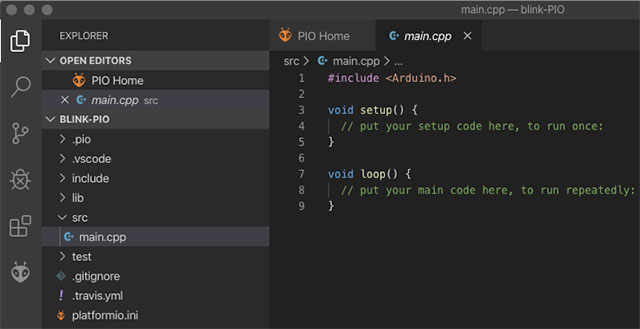
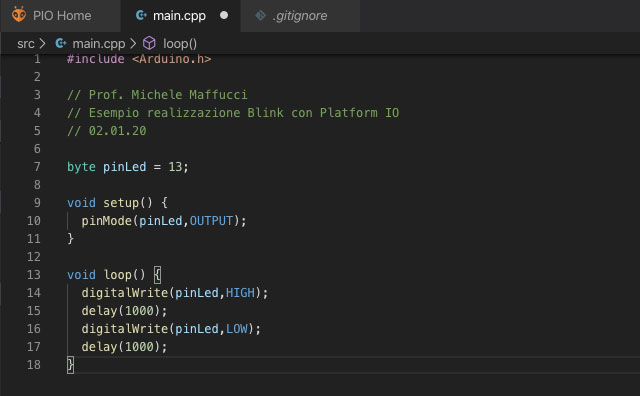
Nella struttura ad albero che compare sulla sinistra della finestra selezionate: src e successivamente main.cpp sulla destra vedrete un sketch pronto con le funzioni setup() e loop() vuoti:
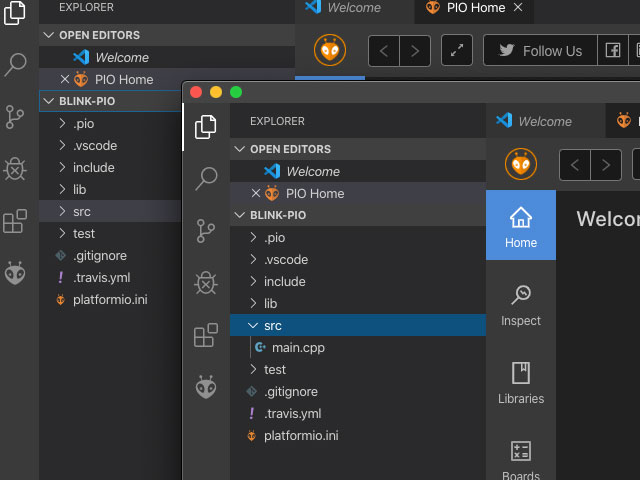
Si noti che PlatformIO non ha l’accesso predefinito alle librerie Arduino, quindi ogni volta che si scrive il codice per Arduino bisogna includere sempre all’inizio dello sketch la libreria Arduino.h
#include<Arduino.h>
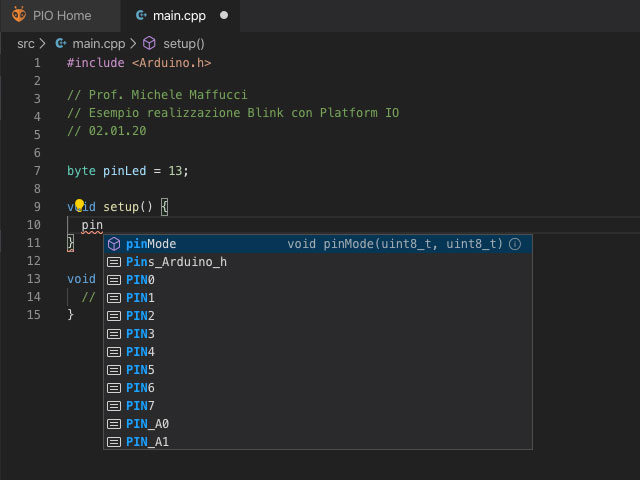
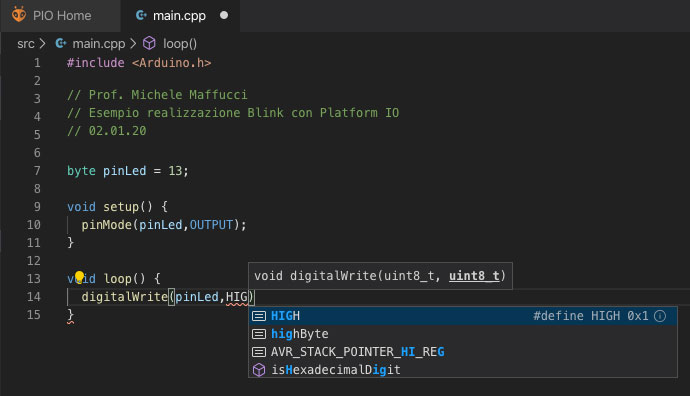
Incominciate a scrivere il codice, noterete immediatamente la comparsa del menù di autocompletamento:
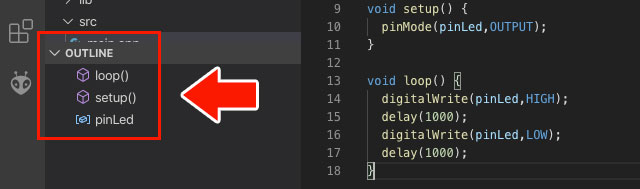
Nella parte sinistra della finestra, nella sezione “OUTLINE” potrete spostarvi immediatamente tra le funzioni presenti nel codice:
Procediamo ora alla compilazione del codice: fate click su “PlatformIO: Build” al fondo della finestra (fascia azzurra)
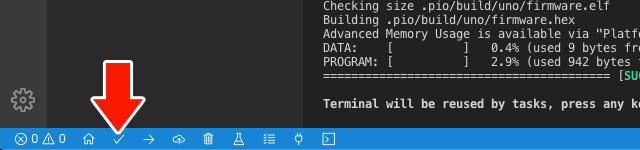
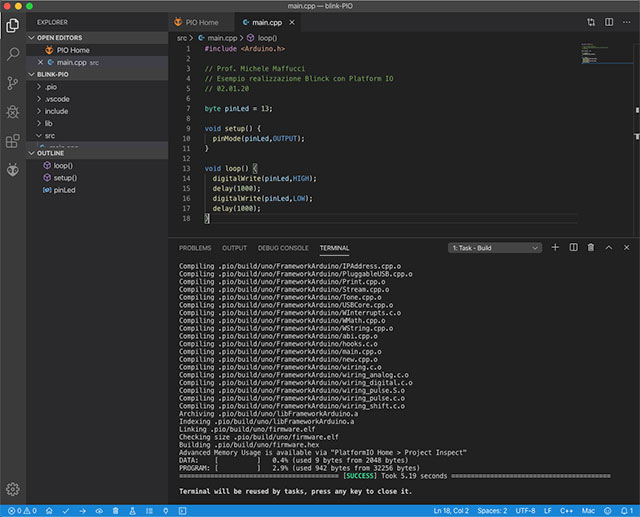
Nella parte bassa della finestra trovate le funzioni: Build, Upload, Upload to Remote Device, Clean, Test, Run Task, Serial Monitor, New Terminal inoltre avete anche icone che vi mostrano: warning ed errori.
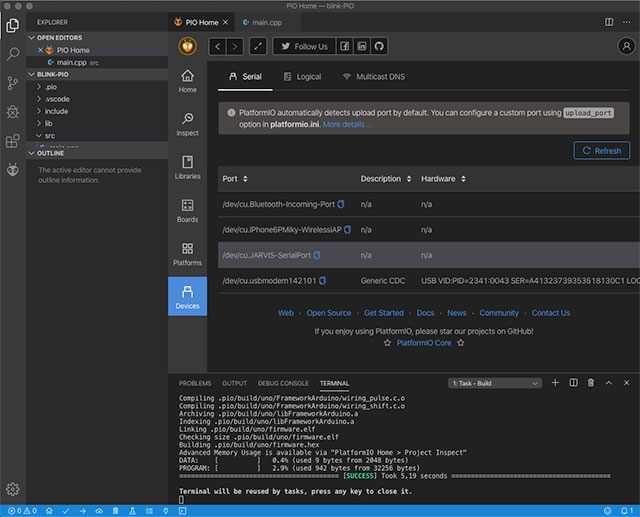
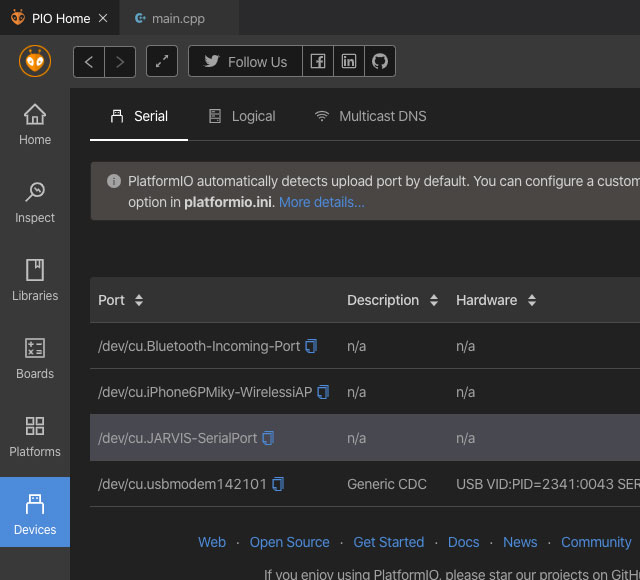
Procediamo ora alla compilazione e al trasferimento sulla scheda. Collegate la vostra scheda al computer, il riconoscimento della scheda è automatico:
Click su “PlatformIO: Upload” per trasferire il programma sulla scheda.

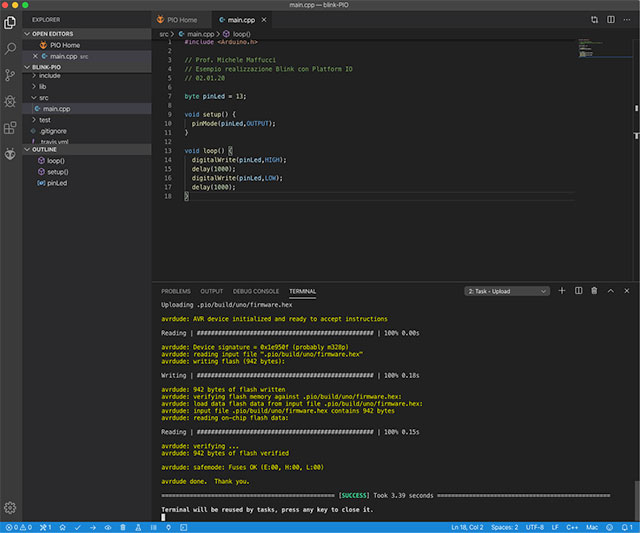
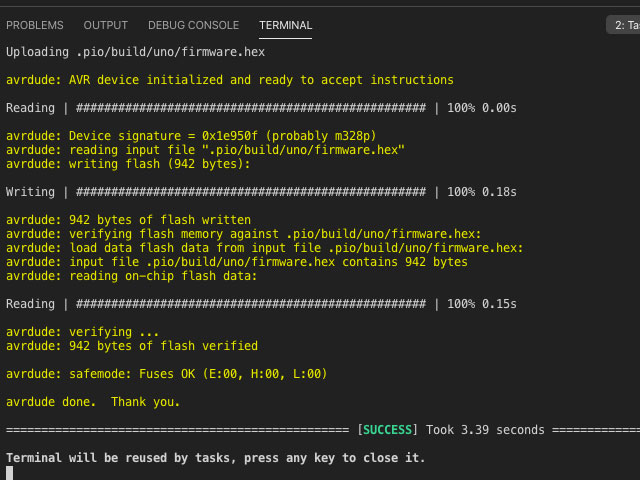
Se tutto è stato eseguito correttamente il LED L sulla scheda incomincerà a lampeggiare.
Buon Coding a tutti 🙂



 Errore: considerare la “,” come separatore di istruzioni e non come separatore di valori. In C una scrittura del tipo: (a, b, c) è una sequenza di espressioni separate da virgola che valuta l’ultima espressione c, mentre {a; b; c;} è una sequenza di istruzioni che non valuta nulla.
Errore: considerare la “,” come separatore di istruzioni e non come separatore di valori. In C una scrittura del tipo: (a, b, c) è una sequenza di espressioni separate da virgola che valuta l’ultima espressione c, mentre {a; b; c;} è una sequenza di istruzioni che non valuta nulla.