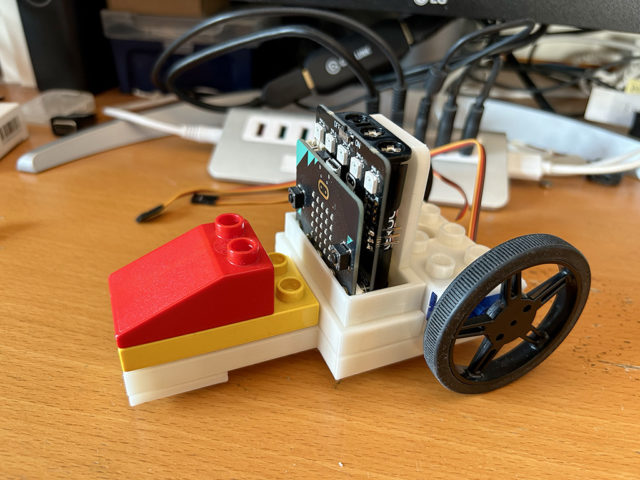
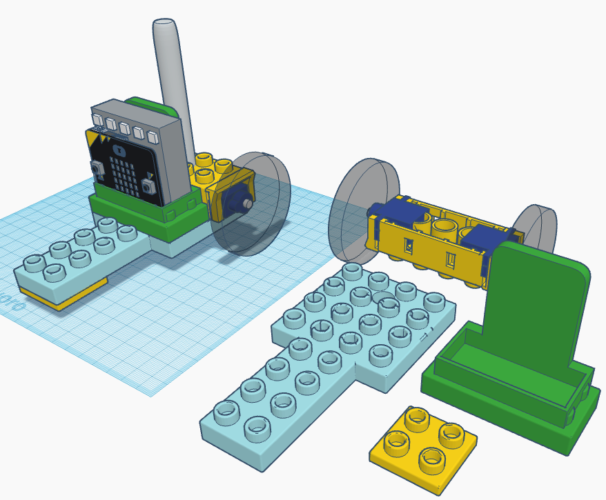
Durante i corsi di formazione sulla realizazione di robot didattici che svolgo per i docenti utilizzo anche la scheda motor:bit di Elecfreaks. Di seguito, riprendendo parte della documentazione del wiki del prodotto pubblico l’introduzione alla realizzazione di un EduRobot basato su questa scheda motore. Per i dettagli costruttivi e di programmazione rimando ai miei corsi.
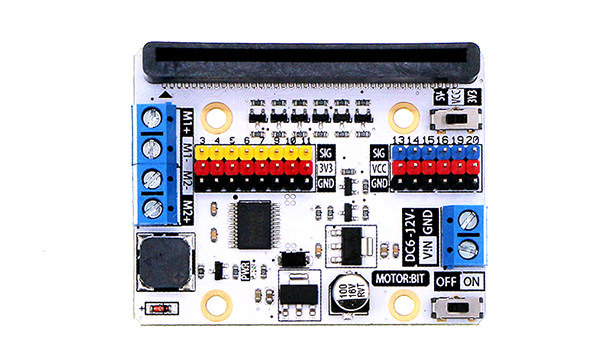
Motor:bit è una scheda di controllo motori utilizzabile con micro:bit. L’integrato il driver utilizzato è il TB6612, in grado di pilotare due motori con una corrente massima erogata per ciascun canale di 1.2A. Sulla scheda sono disposti 16 pin maschi I/O e su ciascuno di essi è presente il pin GND e Vcc, i pin 19 e 20 dedicati alla comunicazione I2C, i pinn 13, 14, 15 per la comunicazione SPI. Sulla scheda i pin I/O da P3 a P7 e da P9 a P10 permettono di pilotare direttamente dispositivi a 3.3V; mentre i pin da P13 a P16 e da P19 a P20 è possibile selezionare la tensione tensione 3.3V/5V mediante uno switch specifico. Sulla scheda è inoltre presente un buzzer passivo.
Caratteristiche
| elemento | parametro |
|---|---|
| nome del prodotto | motor:bit |
| tensione di alimentazione | 6-9 V DC |
| numero massimo di motori | 2 |
| massima corrente erogabile per ciascun motore | 1,2A |
| numero di pin digitali | 12 |
| I2C | presente |
| SPI | presente |
| buzzer passivo | presente |
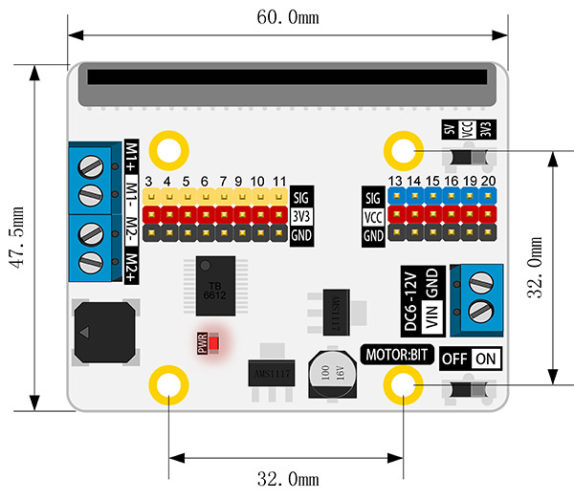
| dimensione | 60mmx47,5mm |
| peso | 20g |
Dimensioni
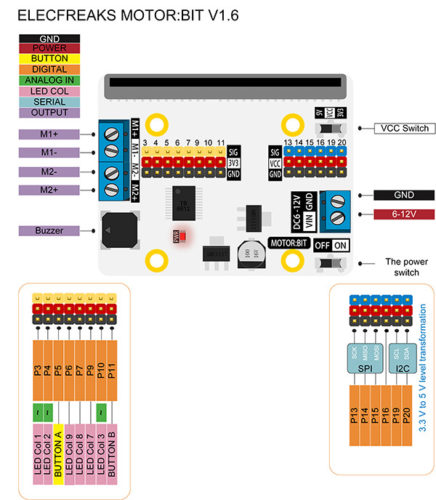
Pinout
Elementi principli della scheda
Connettore motore M1-M2
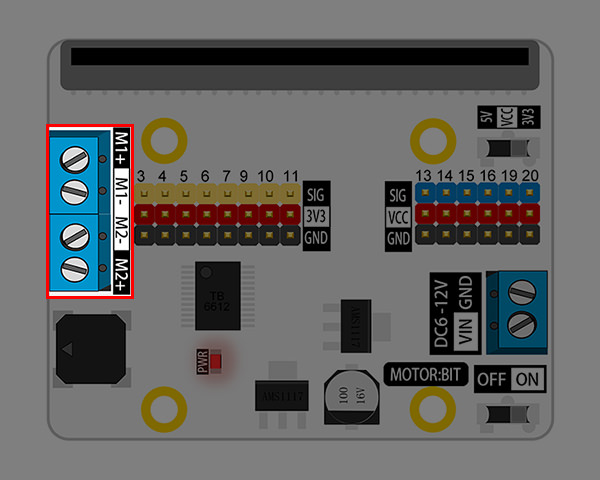
Ad M1 e M2 è possibile collegare separatamente a un motore DC con una corrente massima di 1.2A.
Buzze passivo
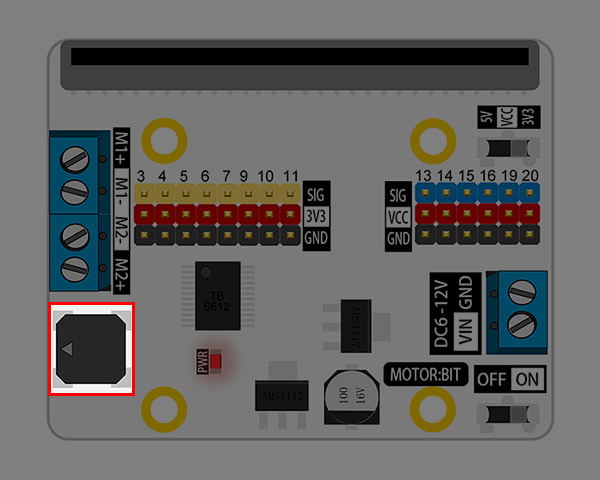
Il buzzer passivo è connesso al pin P0 di micro:bit e con esso, così come accade per il buzzer del micro:bit V2 è possibile riporodurre musica.
Switch di alimentazione
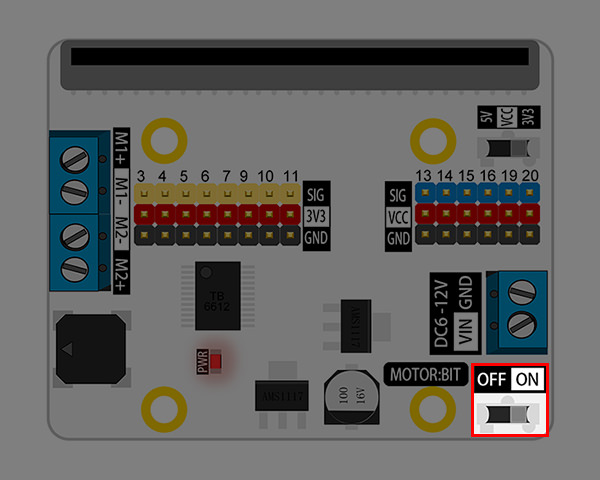
In basso a destra della scheda è presente uno switch che consente di accendere e spegnere la scheda.
Selezione alimentazione: 3,3V / 5 V
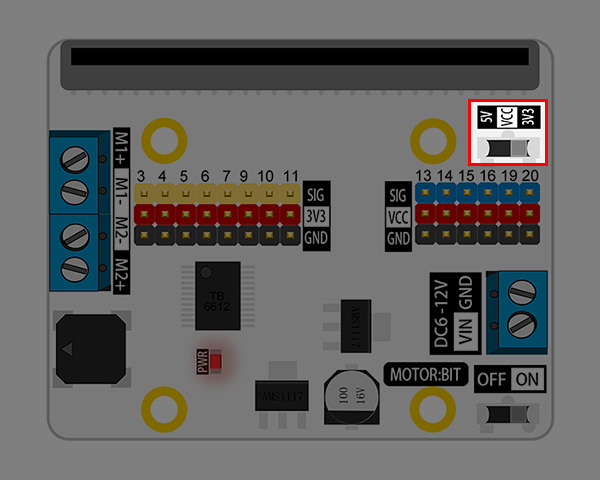
La selezione del livello di tensione può essere fatta solo per i pin: P13, P14, P15, P16, P19, P20.
Pin G-VCC-S Standard
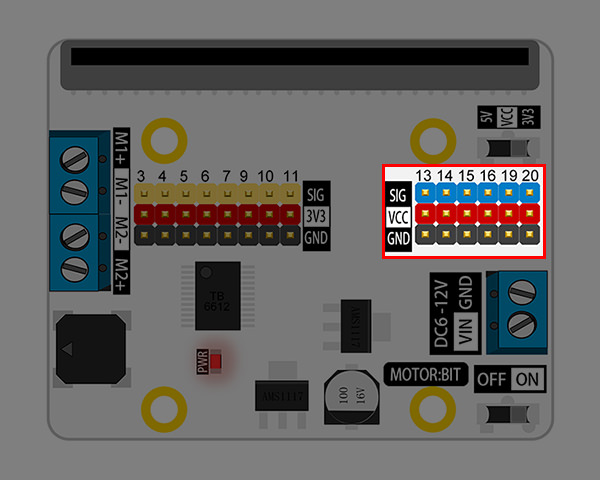
4 porte GPIO (P13-P16) e 1 connettore dedicato per la comunicazione I2C (P19-P20). E’ possibile collegare dispositivi a 3.3V/5V in base selezione fatta con lo switch di selezione alimentazione.
Pin G-3V3-S Standard
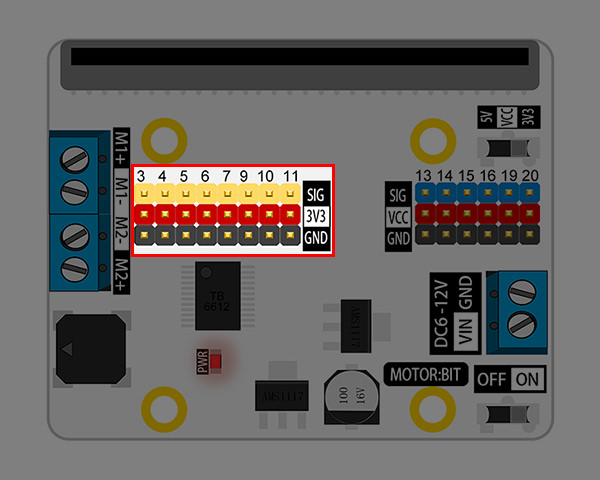
E’ possibile collegare 8 dispositivi che lavorano con un’alimentazione di 3.3V. Tra questi, P3, P4, P10 possono essere utilizzati come connettori di ingresso per segnali analogici.
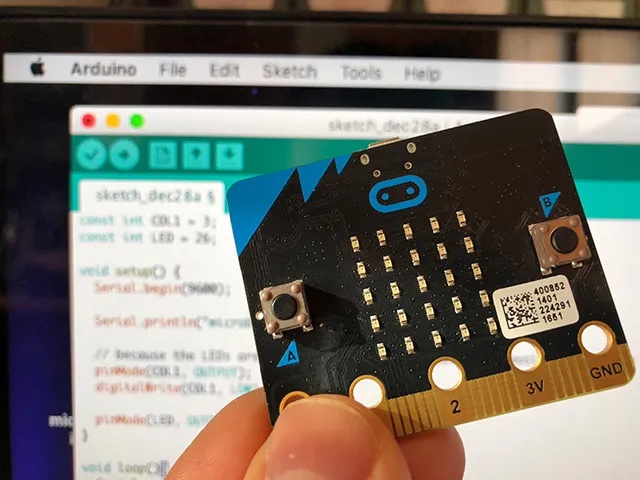
Connettore micro:bit
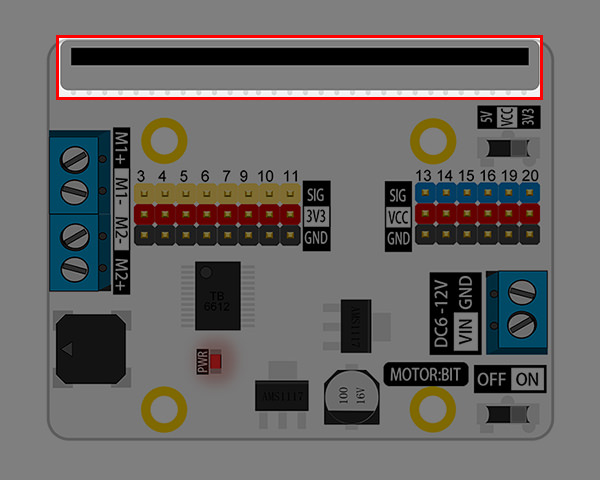
E’ possibile connettere un micro:bit V1 o V2.
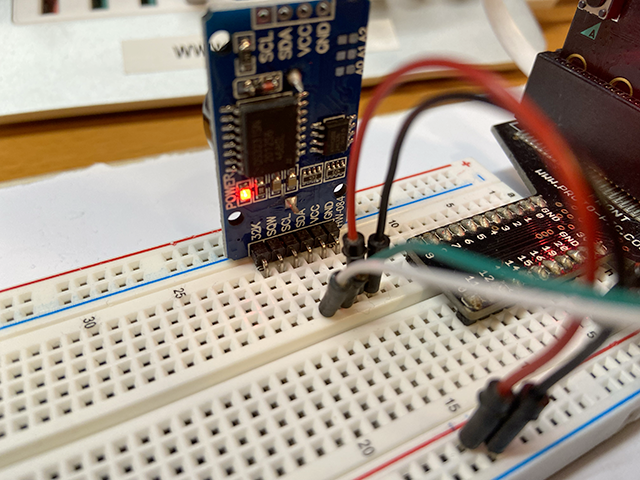
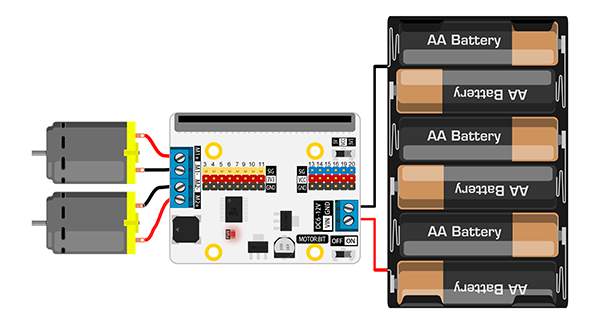
Collegamenti elettrici
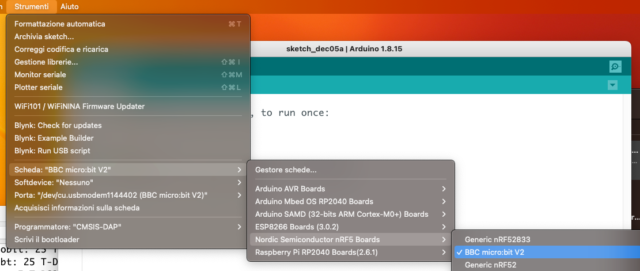
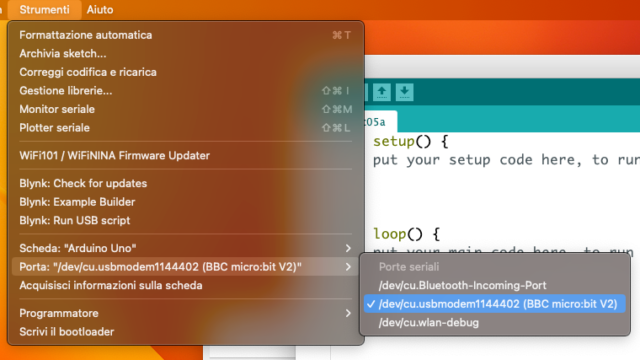
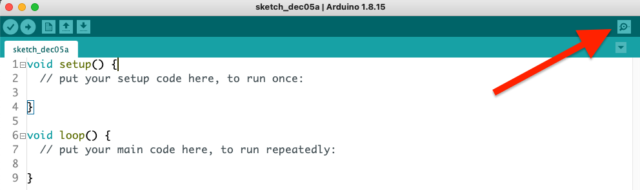
Programmazione
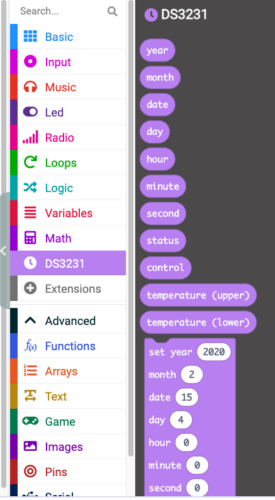
Dal MakeCode Editor aggiungere l’estensione motorbit:
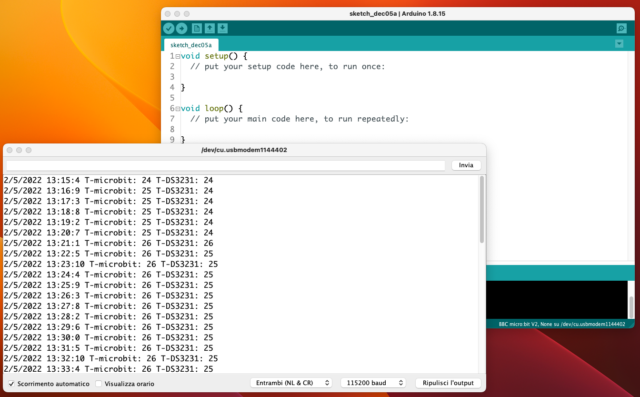
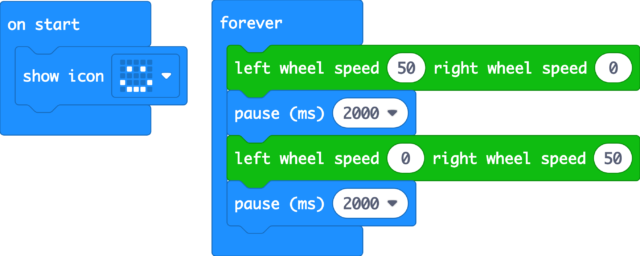
Scrivere il codice che consente di far ruotare i motori in sequenza per 2 secondi:
Per ulteriori approfondimenti e sperimentazioni vi rimando ai miei corsi di prossima uscita su portale ScuolaFutura oppure Tecnica della Scuola.