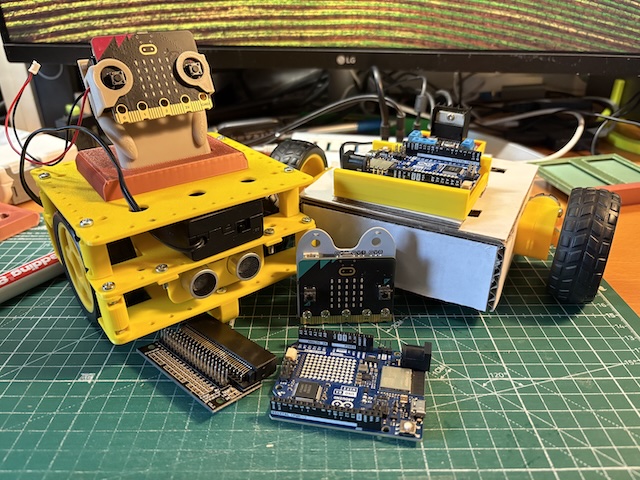
In questi giorni sto lavorando alla preparazione della 6ª edizione del corso di robotica a basso costo ed ho rimesso mano a uno dei “classici” del mio laboratorio: DotBot:bit. Chi segue il sito da tempo lo conosce: nasceva come robottino essenziale per portare in classe micro:bit con un approccio pratico, replicabile e sostenibile.
Perché ripartire da DotBot:bit e perché aggiornarlo
DotBot:bit era nato con un obiettivo molto chiaro: fare robotica con materiali semplici, valorizzando la didattica laboratoriale e la possibilità di iterare rapidamente tra:
idea > prototipo > test > miglioramento.
Oggi lo scenario in classe è ancora più vario: c’è chi lavora con schede e moduli differenti, chi ha la stampa 3D, chi invece preferisce (o deve) restare sul cartone e su soluzioni ultra-economiche. Per questo ho progettato un’evoluzione concreta e “da corso”.
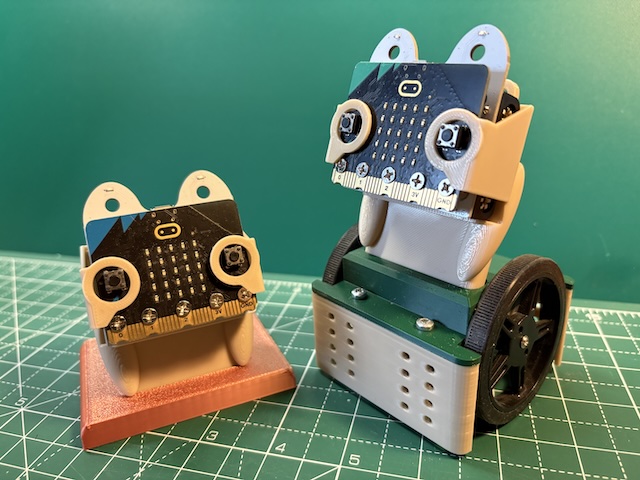
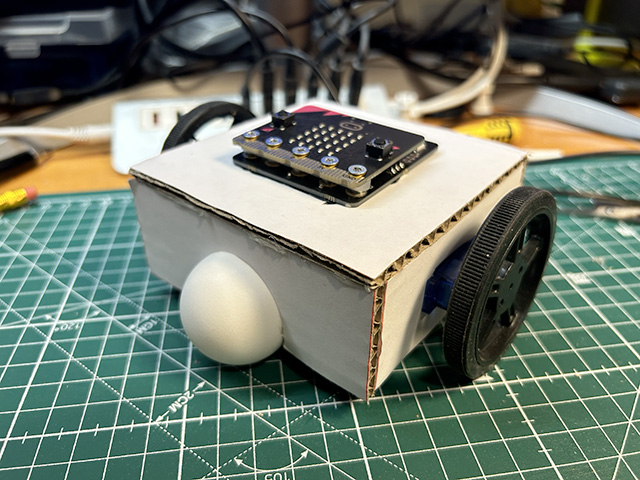
Nasce Codino: una struttura, due piattaforme
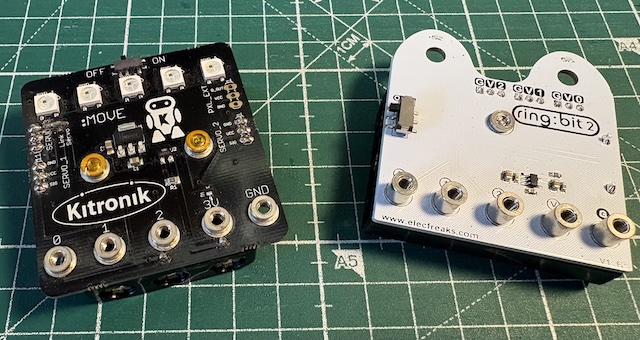
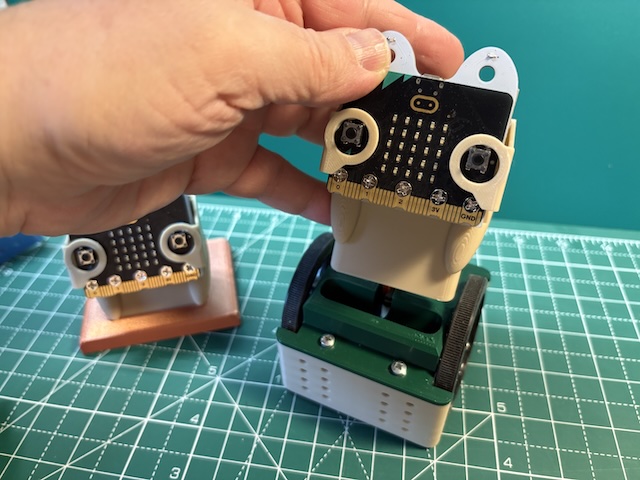
La novità si chiama Codino: una struttura aggiornata (derivata da DotBot:bit) pensata per ospitare in alternativa due setup molto diffusi in ambito micro:bit:
- Ring:bit V2
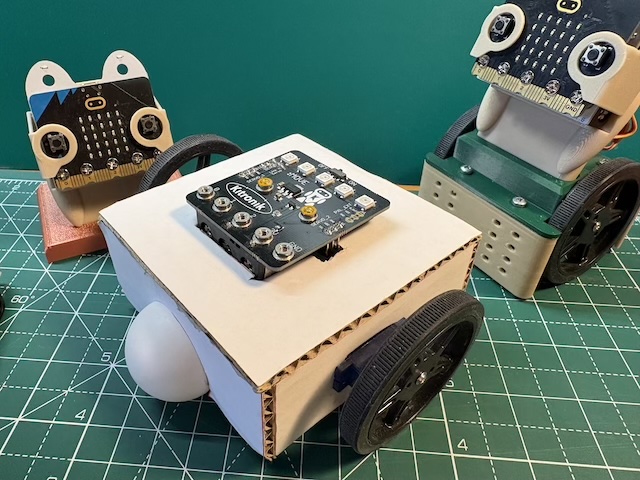
- Kitronik :MOVE mini
entrambe le schede hanno form factor compatto.
L’idea è semplice ma didatticamente potente: stessa “scocca” di progetto, due piattaforme, così il corso (e le attività in classe) si adattano ai vincoli reali: disponibilità di materiali, budget, tempi, livello della classe.
Cosa sto preparando per il corso
Durante la preparazione sto lavorando su tre fronti, tutti pensati per diventare attività trasferibili in classe:
- Adattamento meccanico e modularità
Montaggi rapidi, sostituzione della scheda senza rifare tutto da capo, riduzione delle parti “critiche” mi riferisco a quelle che si rompono o richiedono manutenzione. - Percorsi di prova “a difficoltà crescente”
Dal primo movimento controllato fino a micro-sfide: traiettorie, correzioni, test su attrito e peso, ragionamento su stabilità e distribuzione delle masse. - Codino è pensato per arrivare senza frizioni alle attività che introdurrò in questa edizione più lunga:
- controllo con gesture recognition via webcam (ML addestrato su gesti)
- mini-progetti di Sumo
- primi prototipi di braccio robot (meccanica essenziale + attuazione)
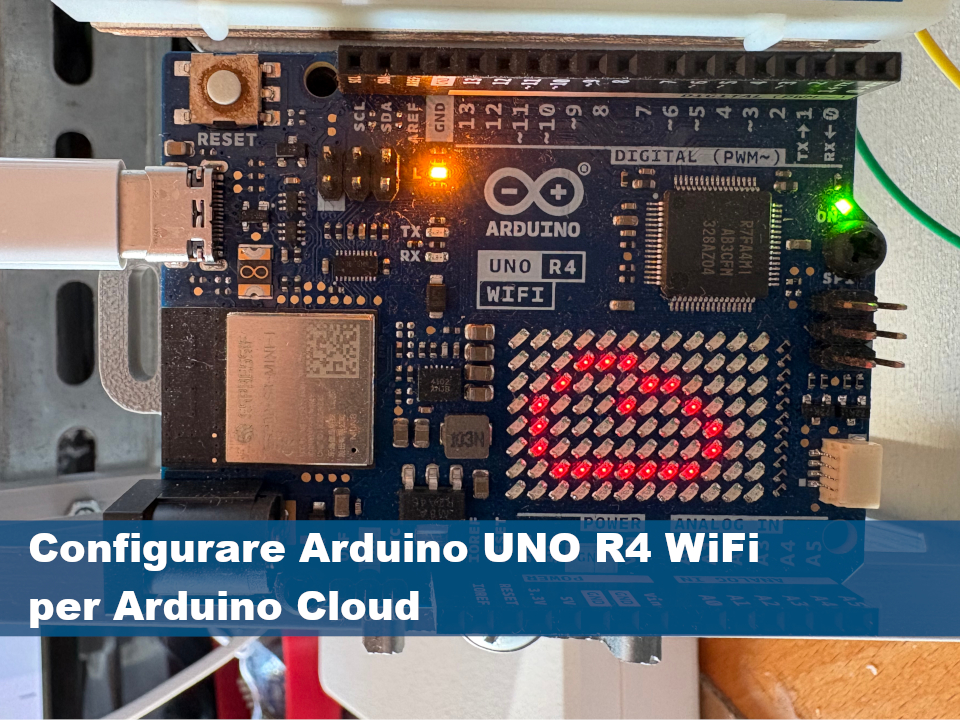
- Robot semplici realizzati con Arduino
Tutti questi sono i contenuti extra resi possibili dall’estensione a 4 lezioni della 6ª edizione.

Stampa 3D o cartone: stesso progetto, due strade
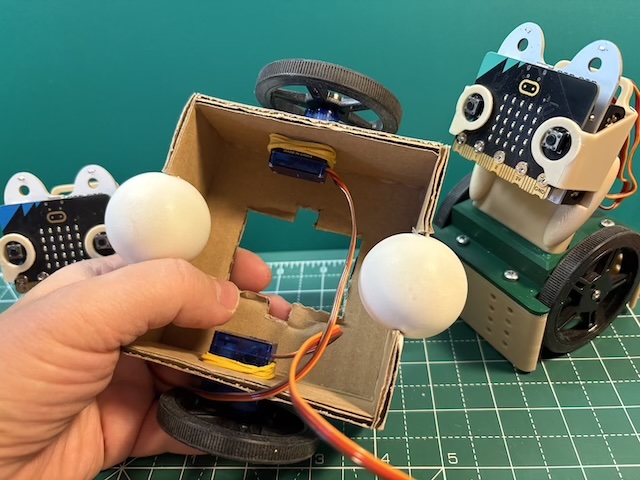
Come nel DNA di DotBot:bit, anche Codino resta coerente con l’impostazione “basso costo”:
- per chi ha una stampante 3D: struttura stampabile e facilmente iterabile;
- per chi non ce l’ha: template e sagome in cartone, per costruire comunque un robot completo e funzionante.
Questo approccio “doppio” è ciò che rende il kit davvero spendibile: non è un modello unico, è un format replicabile.
Se volete seguire l’evoluzione e portarla in classe
Se vi interessa vedere Codino in azione e, soprattutto, costruire un percorso completo da replicare con i tuoi studenti, la 6ª edizione del corso “Creare un kit di robotica educativa a basso costo” parte il 16 gennaio 2026 e prosegue fino al 3 febbraio 2026 (4 incontri).
Nei prossimi giorni pubblicherò anche qualche foto “work in progress” della struttura Codino ed altri robot.
Buon Making a tutti 🙂