
Il Buzzer
Quando progettiamo un impianto di automazione abbiamo quasi sempre bisogno di avvisare l’utente di uno stato o di un’anomalia. Oltre alle classiche spie luminose, un modo immediato per “farsi sentire” è impiegare un buzzer, noto colloquialmente come cicalino. Questo piccolo attuatore trasforma un segnale elettrico in un impulso sonoro che può variare da un semplice beep continuo a brevi toni di diversa frequenza.
Tipologie principali di buzzer
Attivo
Contiene un oscillatore interno che genera automaticamente la frequenza fissa non appena viene alimentato.
Con Arduino basta portare il pin di alimentazione a livello HIGH/LOW per abilitare o silenziare il suono.
Passivo
Non possiede oscillatore: necessita di un’onda quadra esterna per farlo vibrare.
Arduino può pilotarlo con PWM (analogWrite) o con la funzione tone() per scegliere la frequenza desiderata.
Tecnologie costruttive
I buzzer – siano essi attivi o passivi – possono realizzarsi con due differenti principi fisici:
- Magnetici
una bobina varia il campo magnetico e fa oscillare una sottile membrana metallica. - Piezoelettrici
un disco di materiale piezo si deforma quando riceve tensione, generando la vibrazione acustica.
La scelta fra le due tecnologie dipende principalmente da:
- Segnale di pilotaggio disponibile (continua, PWM, ampiezza)
- Pressione sonora richiesta (volume)
- Spazio e forma concessi dal progetto
Come funziona un buzzer attivo

All’interno è presente un piccolo circuito oscillatore che, alimentato in continua, fa variare il campo magnetico di una bobina. La bobina è rigidamente accoppiata a una membrana, la quale vibra alla frequenza impostata dal circuito e produce un suono costante. In pratica: lo accendiamo – suona; lo spegniamo – tace.
Dati tecnici
- Tensione nominale: 6V DC
- Tensione di esercizio: 4-8V DC
- Corrente nominale: < 30mA
- Tipo di suono: segnale acustico continuo
- Frequenza di risonanza: ~2300 Hz
Come funziona un buzzer passivo

Il buzzer passivo è sprovvisto di oscillatore e si comporta come un piccolo altoparlante: emette il tono dell’esatta frequenza del segnale che riceve. Con Arduino possiamo quindi:
- generare una frequenza fissa con tone(pin, freq);
- modulare il duty-cycle tramite analogWrite() per variare il volume;
- creare melodie cambiando velocemente frequenza e durata.
Dati tecnici
- Tensione nominale: 5V DC
- Tensione di esercizio: 4-8V DC
- Corrente nominale massima: ≤ 32 mA
- Min. Uscita audio a 10 cm: 85 dB
- Temperatura di esercizio: da 20°C a 45°C
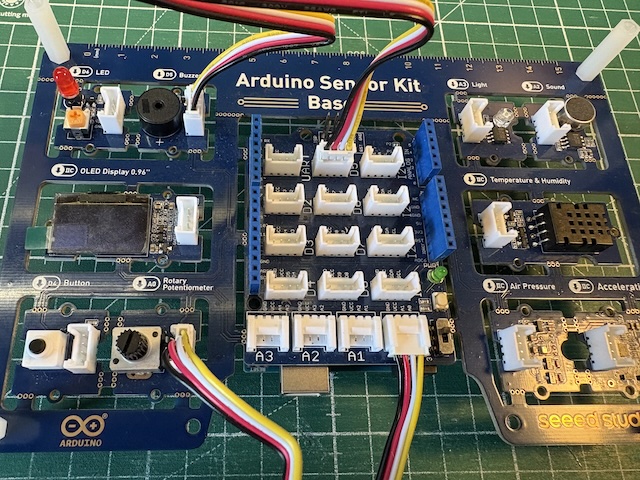
Poiché vogliamo utilizzare il buzzer dell’Arduino Sensor Kit a questo punto possiamo chiederci:
“ma di che tipo è il buzzer di questo kit?”
E’ un buzzer di tipo passivo.
Nelle spiegazioni abbiamo parlato di PWM, di seguito alcuni dettagli, ma se volete approfondire consultate le mie slide: Alfabeto Arduino – Lezione 2 e l’approfondimento su questo sito: Arduino – Approfondimenti sulla modulazione di larghezza di impulso (PWM).
Per uno studio ancora più approfondito: Secrets of Arduino PWM.
Che cos’è il PWM
La modulazione di larghezza d’impulso, o PWM (Pulse Width Modulation), è una tecnica che permette di ottenere effetti analogici usando mezzi digitali. Il controllo digitale genera un’onda quadra, un segnale che passa continuamente da acceso (ON) a spento (OFF). Variando la frazione di tempo in cui il segnale rimane acceso (alto) rispetto a quella in cui rimane spento (basso), è possibile simulare tensioni intermedie tra lo 0 V (spento) e i 5 V (acceso al 100 %). Il periodo in cui il segnale resta acceso si chiama larghezza dell’impulso. Modificando (ovvero modulando) questa larghezza si ottengono valori analogici diversi. Se la commutazione ON/OFF avviene abbastanza velocemente, il segnale risulta percepito come una tensione “media” continua compresa tra 0 V e 5 V.
Questo segnale PWM può dunque essere usato per controllare con facilità un buzzer passivo.
Per generare segnali PWM con Arduino si utilizza la funzione analogWrite(), mentre digitalWrite() produce solo segnali in corrente continua (DC).
Sulla tua scheda ci sono sei pin digitali contrassegnati dal simbolo “~” (tilde), che indica la capacità di gestire un segnale PWM: 3, 5, 6, 9, 10, 11. Questi sono chiamati pin PWM.
Collegamenti
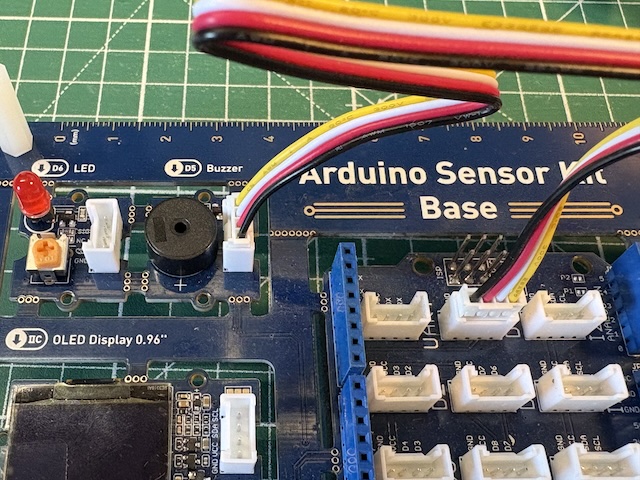
Come abbiamo detto precedentemente Il buzzer del kit è passivo: non produce autonomamente il tono, ma vibra quando riceve un’onda quadra. Con analogWrite() inviate un’onda PWM; variando il duty-cycle (0-255) variate il volume.
Esempio 1: emissione di un beep
/* Prof. Maffucci Michele
beep con il buzzer
14.05.25
*/
const int BuzzerPin = 5; // D5 ha anche il simbolo ~ = PWM
void setup() {
pinMode(BuzzerPin, OUTPUT); // imposta il pin come uscita
}
void loop() {
analogWrite(BuzzerPin, 128); // 50 % di duty-cycle ≈ volume medio
delay(1000); // suona per 1 s
analogWrite(BuzzerPin, 0); // silenzio
delay(1000); // pausa di 1 s
}
Funzionamento del codice
- pinMode()
imposta il pin in uscita, così può fornire tensione - analogWrite(pin, val)
genera un’onda quadra a ~490 Hz sul pin; val è il duty-cycle (0 = 0 %, 255 = 100 %) - delay(ms)
pausa del programma – qui determina per quanto tempo il buzzer resta attivo/inattivo
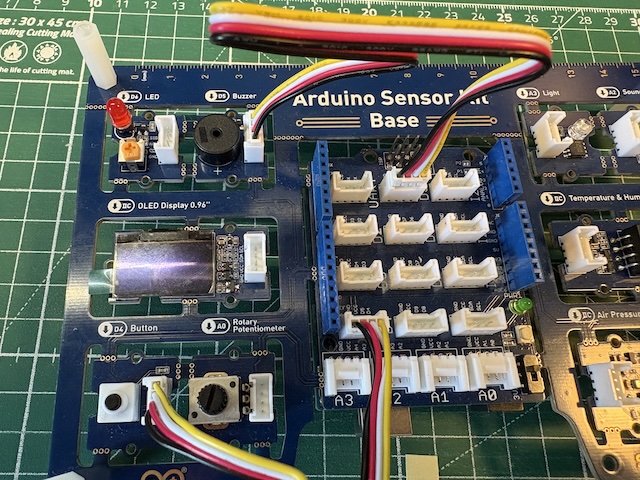
Esempio 2: utilizziamo ora un trimmer per modificare il delay che varia tra 100 e 1000 millisecondi, per fare questa operazione utilizzeremo la funzione map che rimapperà i valori presenti su A0 nell’intervallo 100, 1000.
/* Prof. Michele Maffucci
Utilizzo di un buzzer passivo per riprodurre
un tono in base alla frequenza impostata
da un trimmer collegato al pin A0
14.05.25
*/
// pin (PWM) a cui è collegato il buzzer
byte buzzerPin = 5;
// variabile in cui memorizzare la frequenza del tono
int intonazionePin = 0;
// variabile in cui memorizzare il valore restituito dall'analogRead
int val = 0;
// frequenza del tono
unsigned int frequenza;
// durata del tono
unsigned long durata = 10;
void setup()
{
// inizializzazione pin a cui è collegto il buzzer
pinMode(buzzerPin, OUTPUT);
}
void loop()
{
// valore analogico letto su A0 inserito con il trimmer
val = analogRead(A0);
// Togliere il commento per valutare
// valore massimo/minimo del valore restituito
// dall'analogRead in questo modo si potranno
// inserire nella map i valori massimi e minimi
// dell'intervallo di partenza
// Serial.println(val);
// delay(1000);
// ValMax = 285, ValMin = 719
// riconvertiti nell'intervallo 1000, 5000
// frequenza assunerà un valore tra 1000 Hz e 5000 Hz
frequenza = map(val, 285, 719, 1000, 5000);
// emissione del tono
tone(buzzerPin, frequenza, durata);
// pausa di 1 millisecondo
delay(1);
}
Esempio 3: scala di note
In questo esempio viene utilizzata la struttura dati array[] per approfondirne l’utilizzo seguire i due link:
/* Prof. Maffucci Michele
scala di note
14.05.25
*/
const int BuzzerPin = 5;
const int scala[] = {262, 294, 330, 349, 392, 440, 494, 523}; // frequenza note
void setup() {}
void loop() {
for (int i = 0; i < 8; i++) {
tone(BuzzerPin, scala[i], 250); // 250 ms ciascun tono
delay(300);
}
delay(1000);
}
Esercizio 4: allarme intermittente controllato dal pulsante
/* Prof. Maffucci Michele
allarme intermittente controllato dal pulsante
14.05.25
*/
#define BUZZER 5
#define PULSANTE 4
void setup() {
pinMode(BUZZER, OUTPUT);
pinMode(PULSANTE, INPUT);
}
void loop() {
if (digitalRead(PULSANTE)) { // premuto?
tone(BUZZER, 3000); // allarme continuo
} else {
noTone(BUZZER); // silenzio
}
}
Esercizio 5: sirena con frequenza variabile
/* Prof. Maffucci Michele
sirena con frequenza variabile
14.05.25
*/
const int BuzzerPin = 5;
void setup() {}
void loop() {
for (int f = 1000; f <= 4000; f += 20) {
tone(BuzzerPin, f, 10);
delay(10);
}
}
L’istruzione for è usata per ripetere, per un determinato numero di volte, una serie di istruzioni, la ripetizione avviene se risulta vera una certa condizione logica, nel caso risulti falsa si esce dal ciclo. Per approfondirne l’uso seguire il link.
Buon Coding a tutti 🙂