Sono felice di annunciare un nuovo progetto formativo che sto progettando da qualche mese il cui obiettivo è quello di mostrare come realizzare oggetti fortemente interattivi che concorrono alla realizzazione di progetti artistici al fine di espandere la creatività degli studenti.
Il corso intende fornire competenze digitali finalizzate all’arte e alla comunicazione digitale per produrre attività multidisciplinari realizzabili da docenti e studenti.
Con esempi pratici verranno mostrate attività capaci di stimolare la fantasia e l’acquisizione di competenze tecnologiche che sfruttano la metodologia STEAM mediante attività pittoriche, musicali e fotografiche.
Per essere creativi, bisogna essere in grado di vedere le cose da una diversa prospettiva utilizzando strumenti che favoriscono la creazione di alternative e possibilità espressive nuove. L’atto creativo non accade casualmente esso è legato a fondamentali qualità del pensiero quali la flessibilità, la tolleranza dell’ambiguità o imprevedibilità, la gioia della scoperta e della conoscenza di cose ignote.
La tecnologia può concorrere allo sviluppo della creatività attraverso la realizzazione di strumenti espressivi fortemente interattivi che permettono di giungere allo sviluppo di nuovi percorsi esperienziali in cui realtà aumentata, intelligenza artificiale e tecnologie digitali mutano il paradigma didattico.
Si partirà da opere di artisti importanti e dal loro modi di fare arte per costruire dispositivi interattivi che, attraverso il Coding permettano agli studenti la realizzazione delle proprie opere artistiche in modo divertente.
Con le proposte dei laboratori di creatività digitale sviluppati durante il corso, si utilizzeranno strumenti tecnologici in grado di stimolare un apprendimento che sfrutta tecnologie manipolative e tangibili, basato sul gioco, l’editing: audio, video e dell’immagine.
Se site curiosi di vedere il dietro le quinte delle sperimentazioni che proporrò durante il corso potete seguirmi su Instagram.
Calendario del corso
Saranno svolti 4 incontri in webinar di 2 ore ciascuno, per un totale di 8 ore:
- Lunedì 16 maggio 2022 – Dalle 17.00 alle 19.00
- Lunedì 23 maggio 2022 – Dalle 17.00 alle 19.00
- Mercoledì 25 maggio 2022 – Dalle 17.00 alle 19.00
- Martedì 31 maggio 2022 – Dalle 17.00 alle 19.00
Iscrizioni
Le iscrizioni potranno essere effettuate seguendo il link sul sito di Tecnica della Scuola.
Destinatari
Docenti della scuola primaria e secondaria di primo grado
Punti tematici
Gli strumenti
-
-
- L’automazione per la creatività
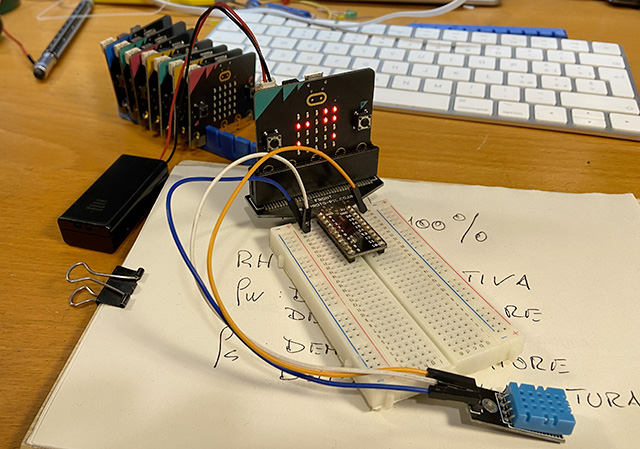
- Schede elettroniche didattiche per creare oggetti interattivi reali: Makey Makey, BBC micro:bit, Arduino
- Attuatori e sensori auotocostruiti
- Software di programmazione visivi
- Il making e l’arte cinetica
-
Attività laboratoriali
-
-
- Dal virtuale al reale: caccia al tesoro con RFID
- Creare Labirinti virtuali con Google Form e QR code
- Escape Room Didattici
- Il museo virtuale
- Creare strumenti musicali e sintetizzatori
- Costruire oggetti e ambienti reali con la stampa 3D e renderli interattivi
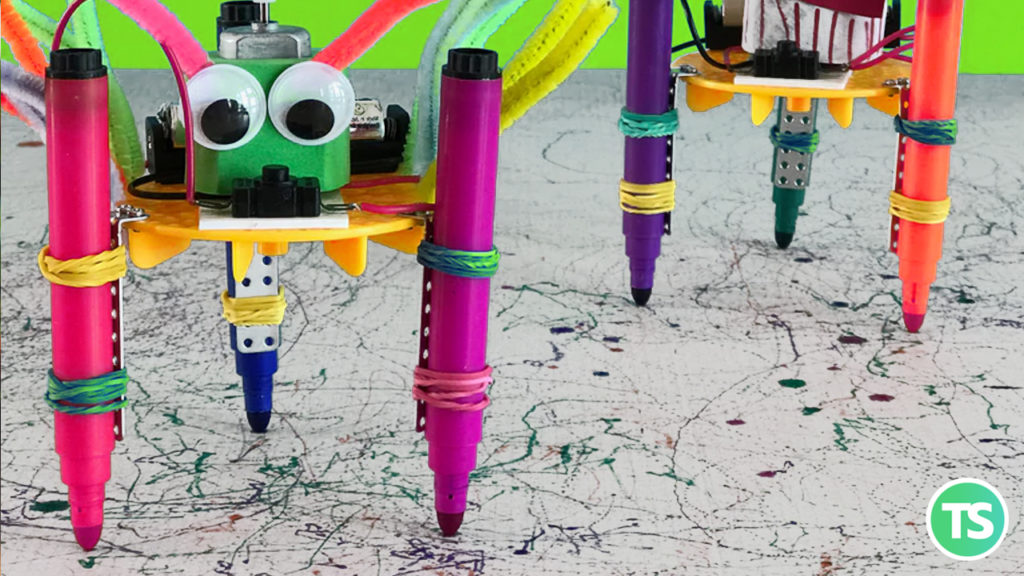
- Il robot artista
- Generare musica dalla variazione di una grandezza fisica
- Arte indossabile interattiva
- Giocare con la luce
-
Obiettivi
L’obiettivo del corso è quello di fornire le competenze necessarie per realizzare in piena autonomia attività laboratoriali di creatività digitale mediante molteplici strumenti hardware e software integrati con oggetti di recupero a basso costo tracciando con esercizi ed esempi specifici, un percorso immediatamente spendibile in classe.
Mappatura delle competenze
I partecipanti al corso acquisiranno le competenze per realizzare attività laboratoriali a supporto dell’apprendimento personalizzato: verrà mostrato come inserire nei propri percorsi didattici l’apprendimento della logica e del problem solving e del making al fine di sviluppare attività creative.
In particolar modo le competenze assimilate saranno:
-
- sviluppo del pensiero logico, del pensiero computazionale e algoritmico;
- rafforzo delle capacità di problem solving e pensiero creativo;
- utilizzo trasversale di schede elettroniche didattiche in più discipline;
- creazione di una didattica attiva e del saper fare che fa uso di uno strumento con forte interazione con il mondo reale;
- sviluppare la capacità di lavoro di gruppo in ambito tecnologico;
- saper utilizzare software per progettare e programmare;
- sviluppare attività per le materie scientifiche e artistiche.
Vi aspetto al mio corso 🙂