

Nella giornata di ieri mi è arrivata una domanda molto sensata, una di quelle che prima o poi ci si pone tutti quando si prova a far muovere un robot con micro:bit o con Arduino.
“Se micro:bit riuscisse a passare da 3V a 5V si risparmierebbero i costi della scheda di espansione, nonché l’ottimizzazione degli spazi. Lei è d’accordo? Chissà perché non lo fanno: ormai tutti abbiamo bisogno di motorini.”
La risposta breve è questa:
Capisco il ragionamento, ma il vero ostacolo non è 3 V vs 5 V. Il punto è che un pin di micro:bit non è uno stadio di potenza.
Anche se la scheda fosse “a 5 V”, non potresti comunque collegare un motore direttamente ai pin in modo sicuro e affidabile.
Vediamo perché, con esempi concreti e riferimenti ai due kit che uso spesso nei corsi: Ring:bit V2 board e Kitronik :MOVE mini.
La spiegazione che segue è volutamente semplificata in quanto non necessariamente i colleghi che seguono i miei corsi sono docenti di materie di indirizzo tecnico.
Perché “alzare la tensione” non risolve il problema
Corrente: il motore chiede molta più energia di quella che un pin può dare
Un motore (anche piccolo) non “vuole solo tensione”: vuole soprattutto corrente, e ne vuole parecchia quando parte (corrente di spunto) e quando è sotto sforzo (ruote che spingono, attrito, urti).
Un pin GPIO di una scheda a microcontrollore è progettato per segnali e piccoli carichi, non per alimentare carichi elettromeccanici. Se provate a farlo, i sintomi tipici sono:
- reset improvvisi della scheda,
- comportamenti instabili,
- surriscaldamento,
- nel peggiore dei casi danni ai pin o al microcontrollore.
Disturbi e picchi: il motore “sporca” l’alimentazione e genera back-EMF
Il motore è un carico induttivo: quando viene acceso/spento o se ne cambia la velocità, può generare picchi di tensione (back-EMF) e disturbi elettrici che:
- mandano in crisi la logica,
- creano interferenze (anche sulla radio/BT),
- degradano l’affidabilità nel tempo.
Serve un driver: lo “stadio di potenza” che separa logica e motore.
Per pilotare un motore DC, ad esempio quelli gialli che tipicamente vengono usati nei progetti didattici di robotica, serve uno stadio di potenza, cioè un driver motore, per esempio:
- ponte H (per andare avanti/indietro e fare PWM in modo robusto),
- oppure MOSFET + protezioni (se serve solo on/off o un verso).
Il driver fa tre cose fondamentali:
- regge la corrente (anche i picchi),
- gestisce la direzione e la velocità (PWM),
- protegge micro:bit dai disturbi e dai picchi del motore.
Citando la richiesta dell’utente: “Ma allora perché micro:bit non è a 5V?”
In realtà molte schede “vivono” già in ambienti dove esistono 5 V (ad esempio USB), ma l’elettronica interna e i pin di I/O lavorano a bassa tensione (tipicamente 3,3 V) perché:
- si riducono consumi e riscaldamento,
- si protegge meglio la scheda,
- si mantiene compatibilità con sensori moderni a bassa tensione,
- e soprattutto (punto chiave): anche a 5 V i pin non diventerebbero “pilotamotori”.
Quindi: passare a 5 V non eliminerebbe la necessità di un driver. Cambierebbe solo alcuni dettagli di alimentazione/compatibilità, ma non la sostanza.
Il caso reale nei kit: Ring:bit V2 board e Kitronik :MOVE mini
Ring:bit V2 board: non è “la scheda che pilota motori”
La Ring:bit V2 board è principalmente una scheda di espansione/breakout:
- rende più comodi alcuni collegamenti (ad esempio porte tipo GVS su P0/P1/P2),
- integra un portabatterie (3×AAA) per alimentare il sistema/il robot,
- fornisce un’interfaccia pratica per prototipare.
Va interpretata come interfaccia e distribuzione di alimentazione/connessioni, non come “micro:bit che pilota motori direttamente”.

Ring:bit V2
Kitronik :MOVE mini: usa servomotori, non motori DC senza elettronica di controllo integrata
La scheda Kitronik :MOVE mini può controllare due servomotori a rotazione continua. Questa scelta è utile per la didattica, perché un servo:
- contiene già la propria elettronica di pilotaggio,
- si controlla con un semplice segnale PWM (impulsi “stile servo”),
- prende l’energia dal pacco batterie/board del kit, non dai pin di micro:bit.
In pratica:
- micro:bit invia il comando (PWM),
- il servo esegue, usando la sua alimentazione dedicata.
Questo è il motivo per cui, con :MOVE mini, si riesce ad avere un robot “semplice” e robusto senza introdurre subito il tema dei ponti H per motori DC.
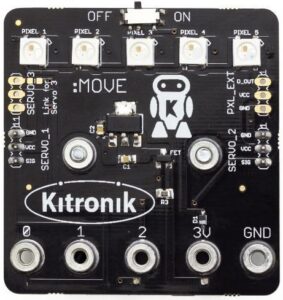
:MOVE mini
Cosa vedremo nel corso: motori DC “veri” e driver dedicati
Durante il corso mostrerò anche l’altro scenario, quello tipico quando si usano i classici motori gialli da 6 V (motori DC con riduttore), dove il driver è obbligatorio.

motore TT
Lavoreremo in particolare con:
- L298N (ottimo per capire il concetto di ponte H e cablaggi, anche se non è la soluzione più efficiente in assoluto),
- Motor:bit di ELECFREAKS (più compatta e didattica, comoda per micro:bit).
Obiettivo: far capire chiaramente la differenza tra:
- “motore DC” (serve driver + alimentazione adeguata),
- “servo” (driver interno, controllo PWM più diretto).
Regola utile sempre: alimentazione separata e masse in comune
Quando si entra nel mondo motori/attuatori, una buona pratica è:
- alimentare i motori/servi con una linea robusta (batterie/pack dedicato),
- e mantenere massa (GND) in comune tra microcontrollore e driver/attuatori (quando richiesto), così i segnali di controllo hanno un riferimento corretto.
Questa singola regola elimina moltissimi “misteri” (reset, comportamenti casuali, servo che impazziscono).
Qualche precisazione in più sui motori DC o motori senza elettronica di controllo integrata
Troverete spesso la dicitura motori bare DC motor in pratica sono motori che hanno solo due terminali (o due fili):
- fornite tensione > girano
- togliete tensione > si fermano
- invertite la polarità > invertono il verso di rotazione (se lo permettete elettricamente)
In ambito tecnico anglofono è abbastanza comune parlare di “bare DC motor” per indicare un motore senza elettronica di controllo integrata (cioè “il solo motore”, tipicamente a due fili) e spesso anche senza riduttore/struttura accessoria.
Esempi tipici:
- i classici motori gialli TT 3–6 V usati nei robot economici
- motorini DC “a spazzole” da modellismo o recuperati da giocattoli
I bare DC motor non hanno al loro interno:
- driver di potenza
- protezioni contro i picchi (back-EMF)
- logica per interpretare un segnale di controllo
Quindi, per farli funzionare con micro:bit, serve aggiungere elettronica esterna:
- un ponte H (es. L298N, TB6612, DRV8833) se vuoi avanti/indietro + PWM
- oppure un MOSFET + diodo se ti basta on/off (e magari un solo verso)

L298N
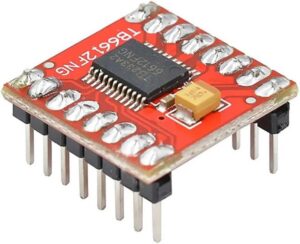
TB6612

DRV8833
Differenza con un servo (o un motoriduttore “intelligente”)
Un servomotore (anche a rotazione continua) invece non è senza elettronica di controllo perché contiene già:
- elettronica di pilotaggio
- circuito di potenza
- logica che interpreta il comando (impulsi PWM stile servo)
Per questo il micro:bit può “comandare” un servo con un semplice segnale, mentre con un motore DC senza elettronica di controllo deve essere gestito da un driver.
Buon Making a tutti 🙂
Bravo Maffucci
Spiegazione chiara ed approfondita e naturalmente è valida anche per altri microcontrollori oltre che per arduino.
Come driver ho utilizzato un semplice transistor ma sicuramente è più valido un mosfet.
Grazie.
Si certamente in generale il discorso va bene per qualsiasi microcontrollore.
Ciao.