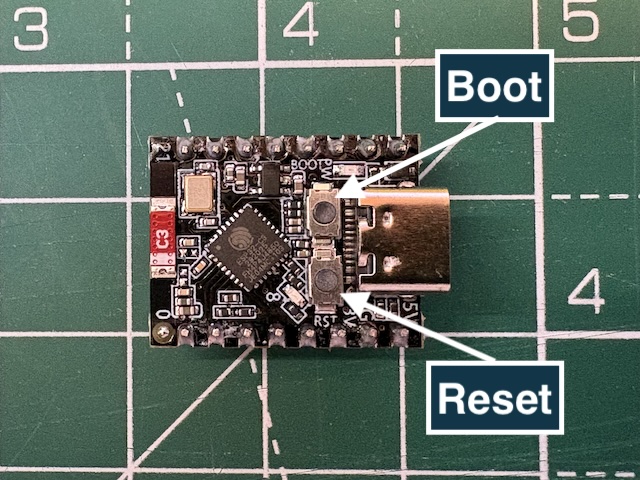
In riferimento al post pubblicato la scorsa settimana, mi è arrivato un messaggio da parte di un lettore: cercando la stessa schedina in rete ha notato che, oltre alla versione ESP32-C3 Super Mini, viene proposta anche la ESP32-S3 Super Mini e mi ha chiesto, che cosa cambia tra le due schede.
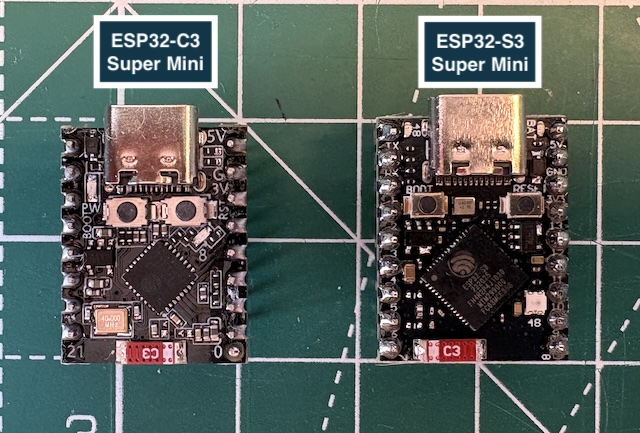
La domanda è più che legittima, perché a colpo d’occhio le due board sembrano quasi identiche: stesso formato compatto, stesso uso tipico in progetti IoT e didattici. In realtà le due schede si differenziano in molte cose: architettura della CPU, prestazioni, numero di GPIO disponibili, gestione USB, e (in molti modelli S3) perfino dettagli pratici come la presenza dei pad per collegare direttamente una batteria Li-Po con ricarica via USB.

In questo articolo metto quindi a confronto ESP32-C3 Super Mini e ESP32-S3 Super Mini, prima indico le differenze elettroniche (quelle che dipendono dal chip), poi evidenzio le differenze che dipendono dalla specifica schedina e dal produttore, così da capire subito quale scegliere in base al progetto e agli obiettivi didattici.
Premessa importante: “Super Mini” non è uno standard
“Super Mini” descrive un form factor molto diffuso, ma non è un nome “ufficiale” che garantisce caratteristiche identiche tra produttori.
Quindi:
- le differenze C3 vs S3 (CPU, USB, risorse) sono reali e dipendono dal chip;
- dettagli come LED onboard, pin esposti, flash/PSRAM, pad batteria possono variare a seconda del lotto e del venditore.
In questo post separo volutamente:
- differenze elettroniche del chip;
- differenze dipendenti dal produttore.
Confronto tra le due schede
Nella tabella che segue vengono indicate le differenze tra le due schede:
| Aspetto | ESP32-C3 Super Mini | ESP32-S3 Super Mini |
|---|---|---|
| CPU | RISC-V single-core (tipicamente fino a 160 MHz) | Xtensa LX7 dual-core (tipicamente fino a 240 MHz) |
| Potenza percepita | ottima per IoT “snello” | migliore su web UI ricche, log, parsing, multitasking |
| GPIO disponibili | in genere meno margine | in genere molti più GPIO “utili” |
| USB | molto comoda per programmazione/debug | USB OTG (progetti USB “creativi”) + programmazione |
| Progetti tipici | sensori/attuatori, MQTT/HTTP, BLE semplice | progetti più “ricchi”, USB, più periferiche insieme |
| Batteria (su molte board) | spesso richiede gestione esterna | spesso include pad batteria + ricarica USB (dipende dal modello) |
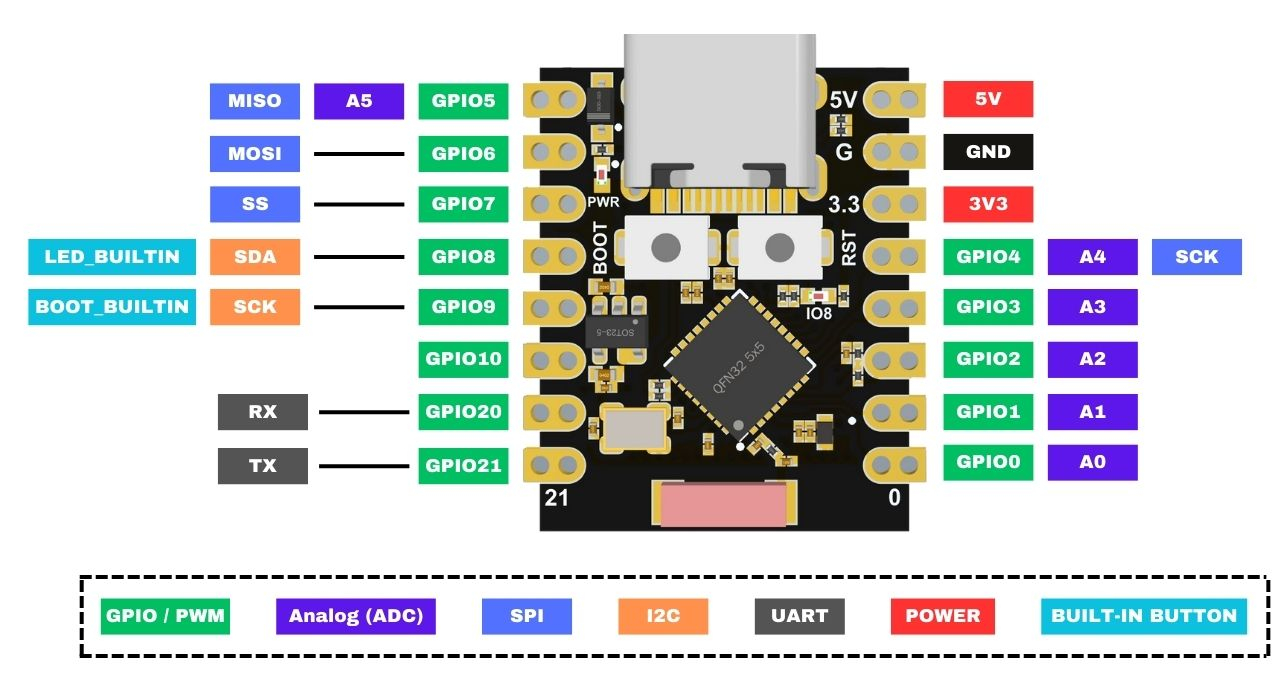
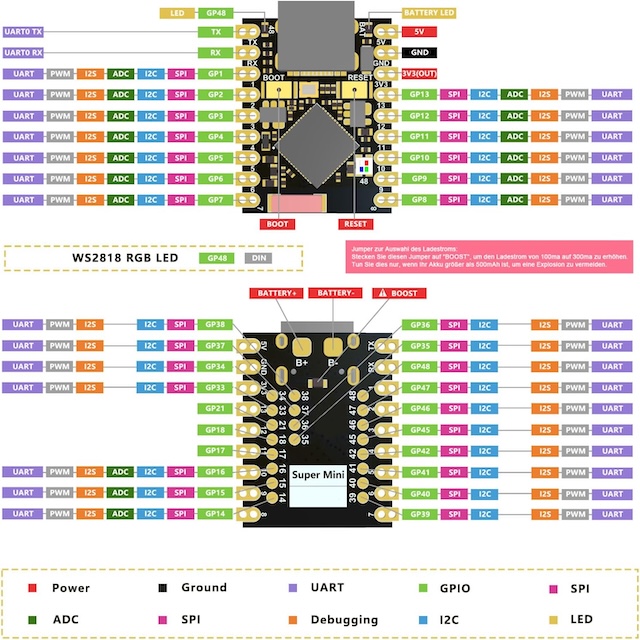
Pinout ESP32 S3 Super mini
Differenze elettroniche
CPU: single-core vs dual-core
Questa è la differenza più importante:
- ESP32-C3: single-core > perfetto per progetti ripetibili, sensori e automazioni;
- ESP32-S3: dual-core > più margine quando ad esempio uniamo web server + gestione rete + periferiche + log + UI; quindi con S3 possiamo gestire programmi di dimensioni più grandi e più complessi.
Utilizzo esteso dell’USB
- Con C3 la USB è “comoda” perché semplifica upload e debug (senza chip USB-serial esterno);
- con S3 poiché è supportato il mondo USB OTG: potete progettare dispositivi che si presentano al PC come periferiche USB (a seconda delle librerie e della configurazione).
GPIO e periferiche
S3 offre in genere:
- più GPIO disponibili (più alternative di cablaggio);
- più margine quando usate più bus/linee insieme (SPI, I2C, UART multiple, ecc.).
Differenze dipendenti dal produttore
LED onboard
Su molte ESP32-C3 Super Mini il LED onboard:
- è su un pin specifico (spesso GPIO8),
- può essere in logica invertita (active-LOW: LOW = acceso, HIGH = spento).
Per evitare confusione (e rendere gli esempi robusti tra lotti), io consiglio di dichiarare due costanti:
const int PIN_LED = 8; // esempio tipico: verificate sul vostro modello
const int LED_ON = LOW; // se il LED è active-LOW
const int LED_OFF = HIGH;
void setup() {
pinMode(PIN_LED, OUTPUT);
digitalWrite(PIN_LED, LED_OFF);
}
void loop() {
digitalWrite(PIN_LED, LED_ON);
delay(300);
digitalWrite(PIN_LED, LED_OFF);
delay(300);
}
Se sulla vostra scheda il LED non è invertito, basta scambiare LED_ON/LED_OFF e il resto del codice rimane identico.
S3: LED RGB
Molte schede ESP32-S3 Super Mini (in generale vale per tutte quelle che ho usato ed acquistate su diversi store) includono un LED RGB (tipo WS2812) molto utile per “stati” e debug (Wi-Fi ok, errore, modalità AP, ecc.).
Attenzione: pin e presenza dipendono dalla board. Prima di copiare uno sketch per la gestione del led RGB, verificate sullo schema/pinout del vostro modello.
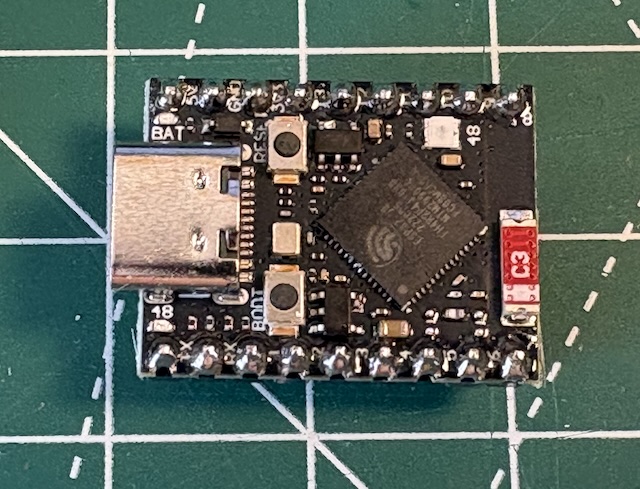
Batteria e ricarica
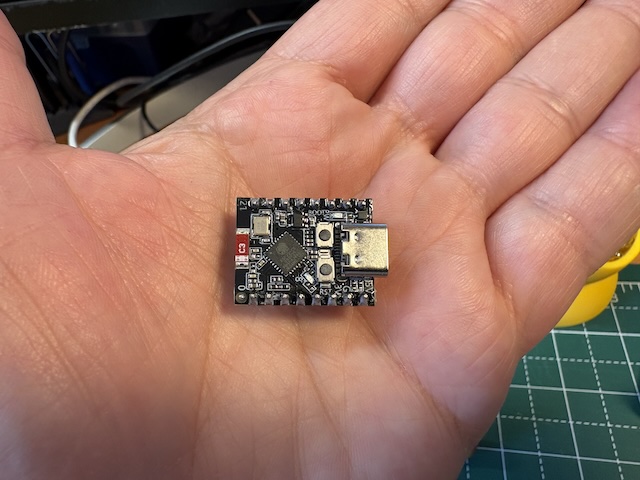
Modello ESP32-S3 Super Mini (nel mio caso acquistato su Amazon)
Su questa scheda, nello schema sono indicati i pin/pad a cui saldare la batteria. In altre parole: su questa versione è previsto il collegamento diretto di una Li-Po 1S (3,7 V nominali) tramite piazzole dedicate.
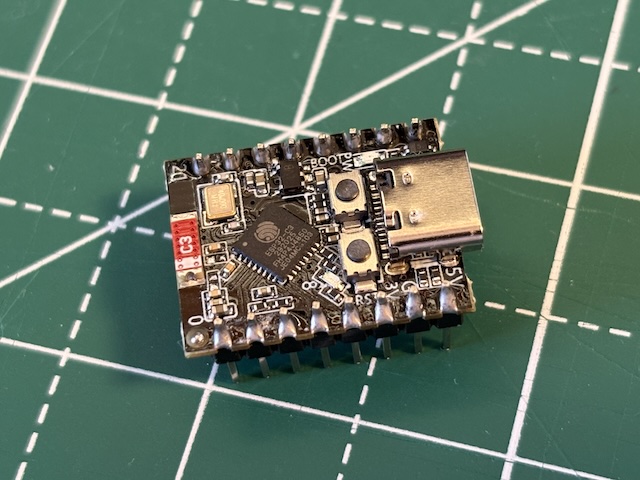
Nella maggior parte delle Super Mini S3 che supportano batteria trovate (di solito sul retro) due pad del tipo:
B+ > positivo batteria
B- > negativo batteria (GND)
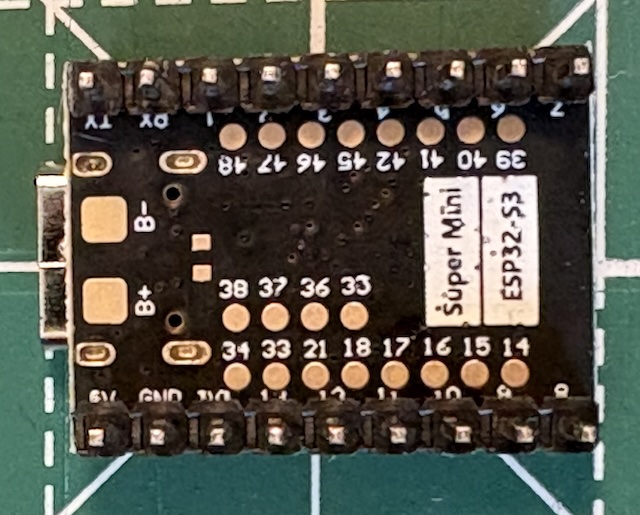
In molte varianti, come quella acquistata da me, insieme ai pad batteria, è presente anche un circuito di ricarica via USB-C e un LED di stato legato alla carica (gestito dal circuito di power/charge, non via GPIO). Lo schema del venditore è sempre il riferimento migliore per capire cosa è effettivamente presente sulla tua board.
Avvertenze pratiche molto importanti
- Usate solo batterie 1S (Li-Po/Li-Ion 3,7 V nominali; 4,2 V a fine carica).
Controllate la polarità prima di saldare: inversione o corto su una Li-Po può danneggiare scheda e batteria; - consiglio di non saldare direttamente la batteria al PCB, potete saldare ai pad un cavetto con connettore (es. JST) così la batteria diventa removibile e riducete stress meccanici sulle piazzole.
Buon Making a tutti 🙂