Si so cosa state pensando in questo momento: “perché ti stai concentrando sulla sperimentazione di così tante schede di prototipazione?”
Sto selezionando una serie di tecnologie che possano essere utilizzate in diversi ambiti, sia didattici per ordine di scuola, che soluzioni per progetti principalmente afferenti alla categoria IoT… e poi se non aggiungo l’aspetto di ricerca nel mio mestiere dove sta il divertimento? 🙂
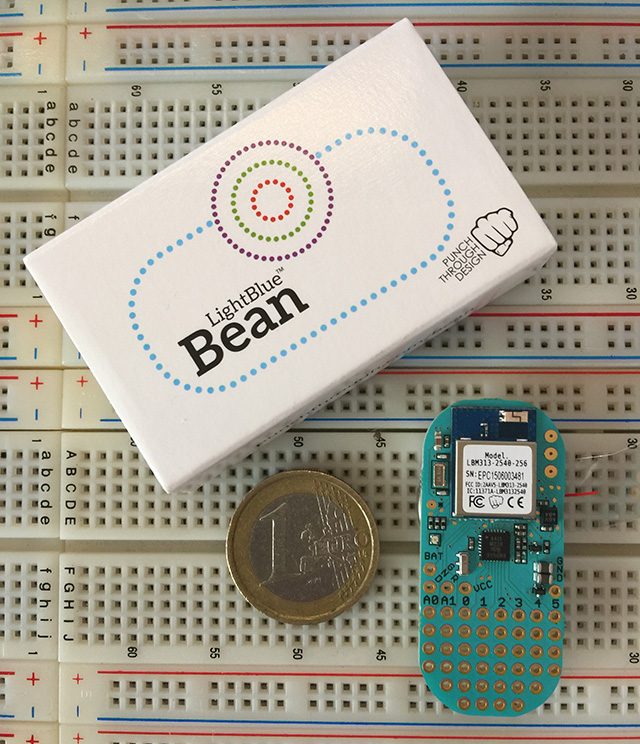
Tra questi ho trovato straordinario LightBlue Bean una piccolissima scheda Arduino che incorpora un Bluetooth 4.0 a basso consumo che può essere programmato in modalità wireless sia direttamente da un’IDE residente su dispositivo mobile disponibile per sistemi iOS che Android oppure può essere programmata direttamente su computer dall’IDE di Arduino. Devo dirvi che, almeno per me, programmare una scheda Arduino compliant, senza la necessità di un computer mi entusiasma parecchio perché mi permette in piena libertà e “leggerezza tecnologica”.

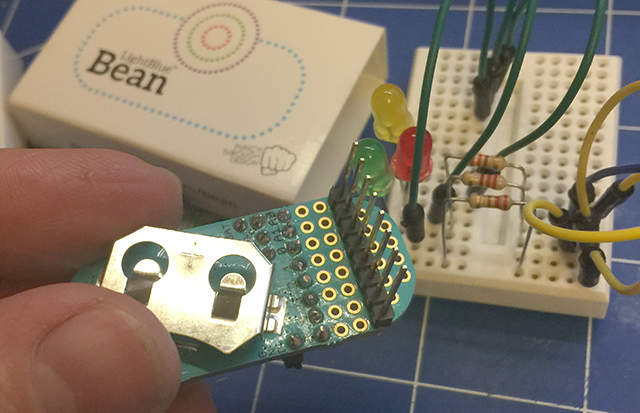
Nella fotografia che vi allego potete immediatamente vedere le dimensioni paragonate ad una moneta da 1€, piccolissimo!

Questo un video che ne mostra le funzionalità:
LightBlue Bean from Punch Through on Vimeo.
Cosa troviamo su questa scheda?
- Accelerometro a 3 assi
- Sensore di temperatura
- LED RGB
- una batteria CR2032
- ATmega 328p con clock a 8MHz
- Bluetooth LE
- Tensione di lavoro 3V
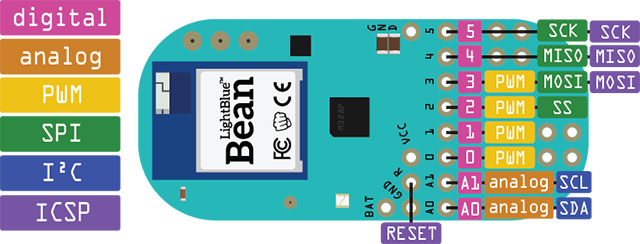
- 6 ingressi/uscite digitali di cui 4 ti tipo PWM
- 2 pin analogici
- Possibilità di utilizzare i protocolli i2C e SPI
Come vi dicevo:
- programmazione wireless
- supporto su OSX e iOS
- supporto Windows 8
Per incominciare ad utilizzarlo su iOS prelevate le due App:
LightBlue Explorer – Bluetooth Low Energy

potrete verificare il funzionamento di LightBlue Bean e non solo, infatti potrete effettuare uno scan di tutte le periferiche Bluetooth 4.0 a basso consumo di energia e controllarne una serie di funzionalità.
Bean Loader – LightBlue Bean
è l’IDE di programmazione che vi consentirà di programmare la scheda direttamente da iPhone, iPad o iPod Touch.
Tra le caratteristiche più importanti di Bean Loader:
Verificare codice Arduino sul vostro dispositivo iOS mediante il Bean Cloud Compiler
- Programmare il vostro Bean in modalità wireless via Bluetooth a basso consumo
- Editor di codice integrato con sintassi C evidenziata
- Collegamento con Dropbox per sincronizzare i vostri sketch ovunque
- Collezione di esempi per incominciare subito con il vostro Bean

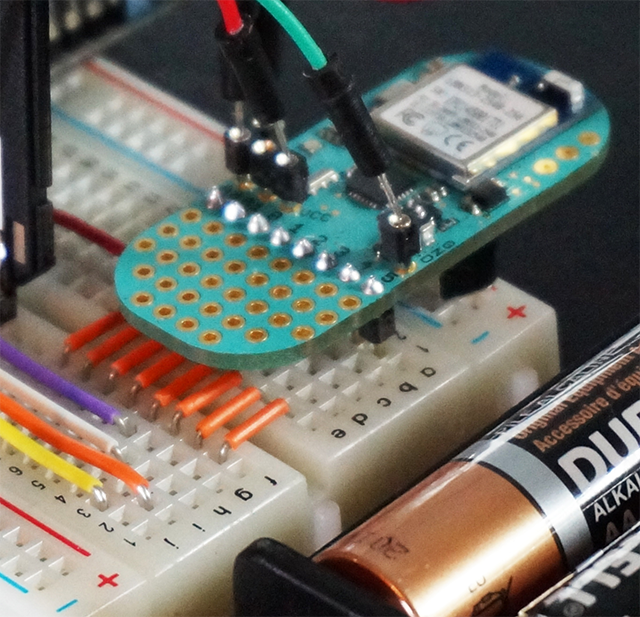
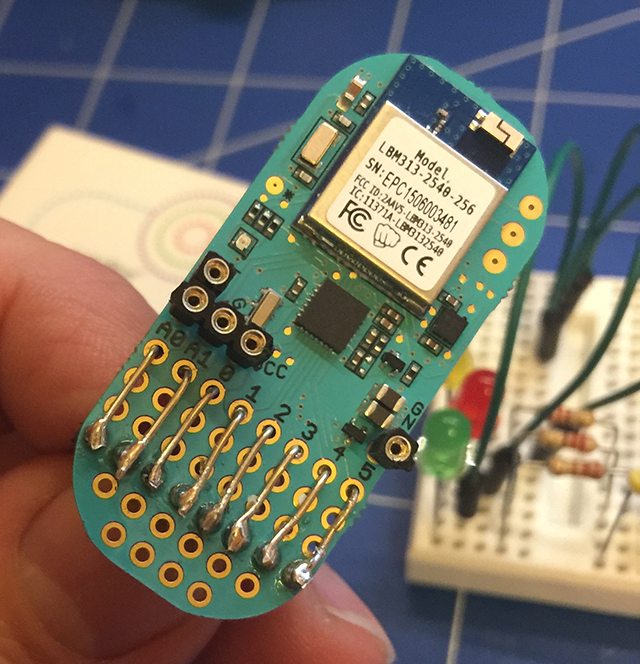
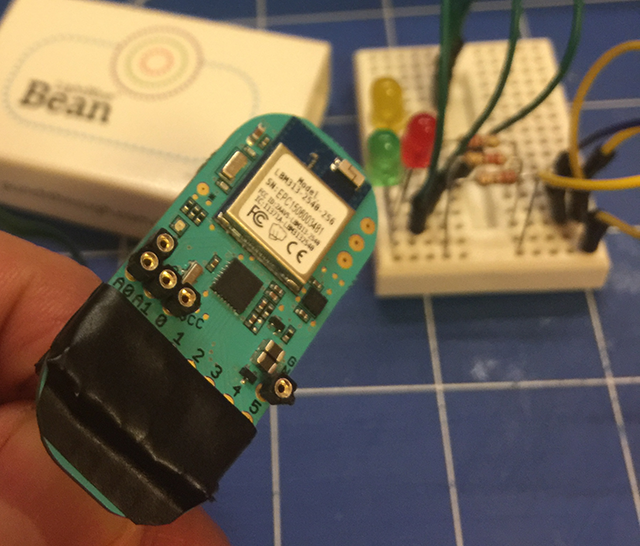
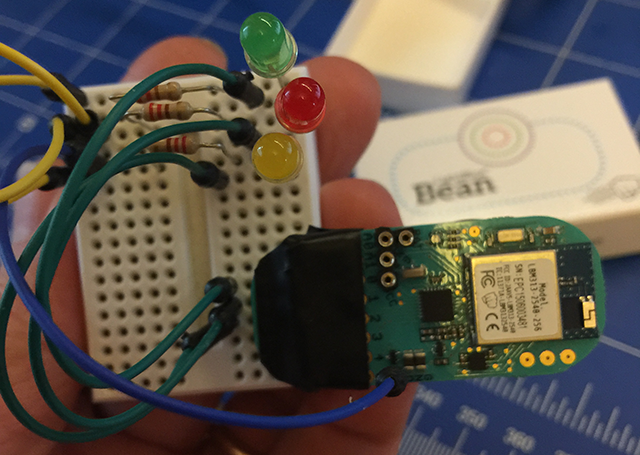
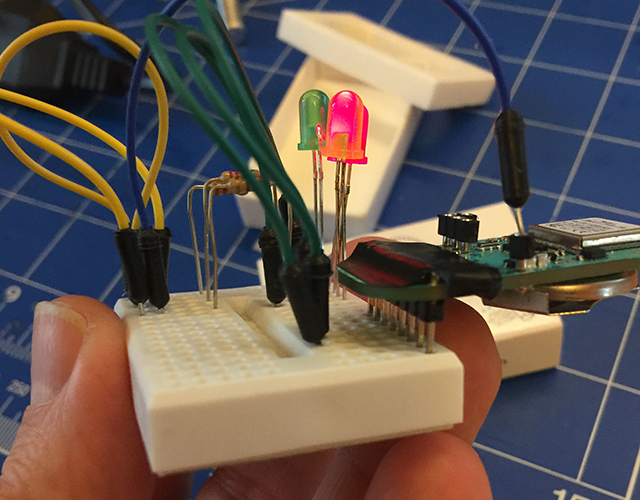
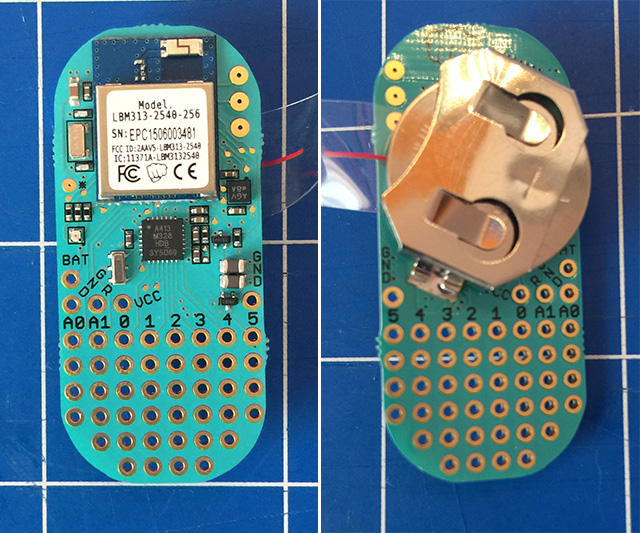
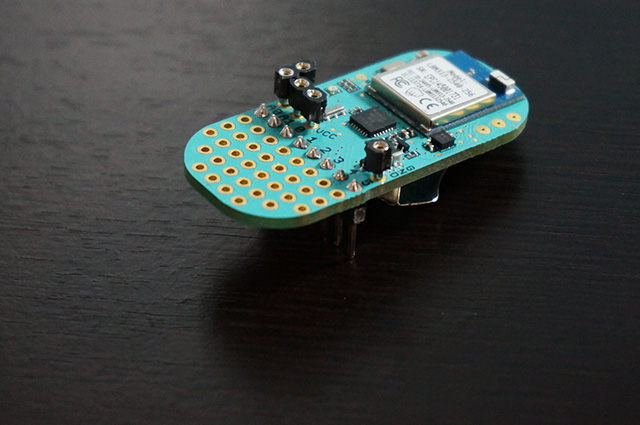
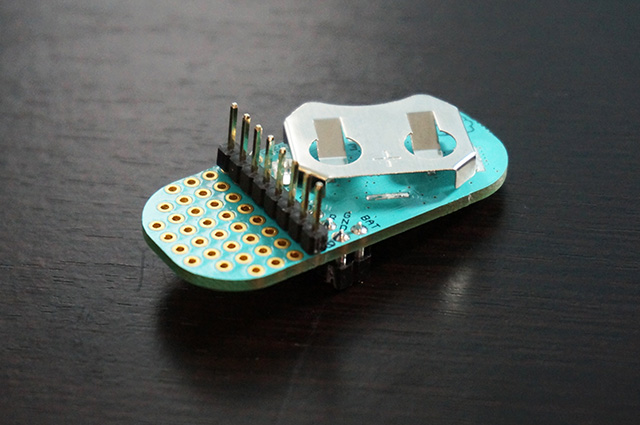
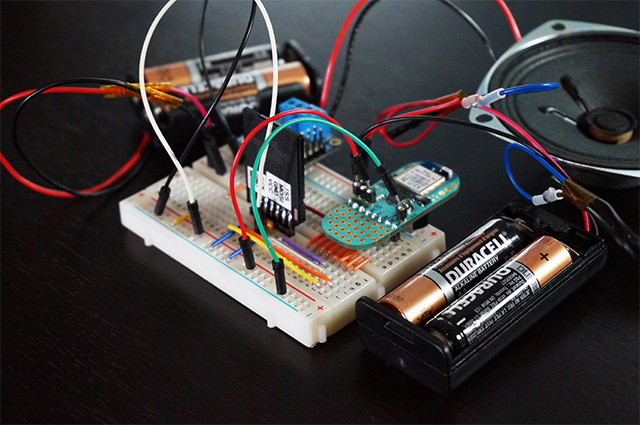
Negli esempi che potete visionare sul sito di riferimento, la componentistica elettronica viene direttamente saldata sulla scheda, tale azione impone l’uso per un solo tipo di progetto e quindi per rendere la scheda riusabile potete adottare la soluzione che seguirò io e dettagliata nelle immagini che seguono, cioè saldare sulla schedina una serie di piedini che ne permettano l’inserimento su una breadboard.
Ma quanto costa questa scheda? 30$
Vengono proposte soluzioni meno costose all’aumentare delle schede acquistate.
Alcuni riferimenti utili:
Spero di avervi incuriosito.
Qualche giorno fa, prima di decidere di acquistare LightBlue Bean, pensavo a quante volte durante le lezioni sono costretto a richiamare gli allievi perché li sorprendo ad usare il cellulare in classe, certo è che se lo usassero con LightBlue Bean i richiami e le note di demerito si trasformerebbero in voti stupendi 😉
Sarà la volta buona?
Buona sperimentazione a tutti.