
Scrivo questo breve tutorial perché in questi giorni sto progettando i prototipi delle attività didattiche che spero potranno essere realizzati dai miei studenti nel mese di febbraio prossimo durante le attività di PCTO. Tra le future attività la realizzazione di più bracci robot da controllare con Arduino e PLC Siemens. Il braccio robot che sto realizzando è costituito da 3 motori passo passo 28BYJ-48 ed un servomotore. La scelta del 28BYJ-48 rispetto ai più potenti NEMA 17 risiede semplicemente nei costi di realizzazione per me e i miei studenti che vorranno replicare il progetto.
Poiché ho l’esigenza di aumentare il numero di grammi al centimetro che possono essere spostati/sollevati dal braccio ho convertito il passo passo 28BYJ-48 da unipolare a bipolare.
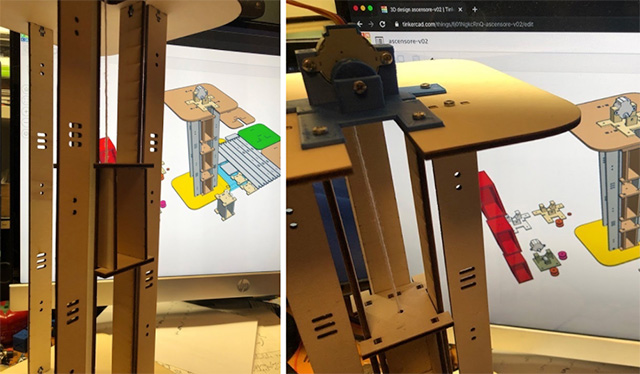
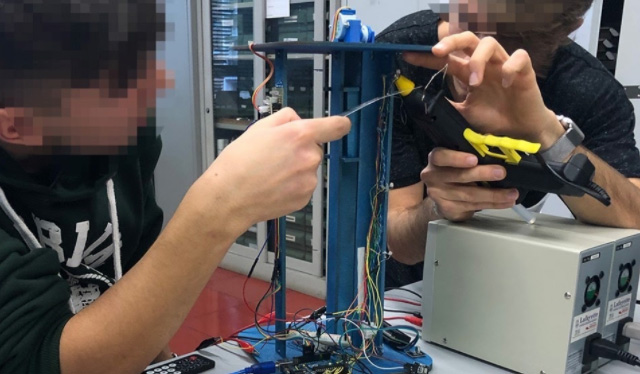
Questo motore passo passo è molto piccolo ma ha una potenza sufficiente per realizzare diverse sperimentazioni. Nello scorso anno scolastico, sempre durante le attività di PCTO, alcuni miei studenti hanno sviluppato l’automazione di un’ascensore la cui struttura portante era da me stata realizzata e tagliata a laser, mente i ragazzi si sono occupati dell’assemblaggio delle parti e della programmazione.
Il 28BYJ-48, come detto nel mio precedente post, è disponibile in due versione, con alimentazione a 5V e a 12V, le due versioni sono identiche, differiscono ovviamente per l’impedenza interna. In questo breve tutorial userò la versione a 12V, ma la procedura è la medesima per la versione a 5V.
Il motore passo passo possiede un riduttore incorporato da 1/64 ciò implica un passo molto piccolo del motore 0,087890625 gradi per passo. Il riduttore ha però un aspetto negativo, ne riduce la velocità di rotazione, ma possiamo sopportare questa sua lentezza considerando il fatto che il prezzo dei questo motore è estremamente contenuto, la versione a 5V può essere acquistata online a non più di 2,5 € e quindi per piccole sperimentazioni è più che sufficiente.
In funzione della modo con cui viene pilotato questo passo passo può raggiungere i 300 gcm in half step, per raggiunge i 380 gcm quando si passa a full step.
Gli stepper bipolari sono più efficienti di quelli unipolari in essi viene alimentata una sola bobina per volta (1/2 una bobina per essere precisi) mentre per i bipolare entrambe le bobine sono alimentate, quindi si ottiene una coppia maggiore.
L’immagine di seguito mostra ciò che accade in un passo passo bipolare.
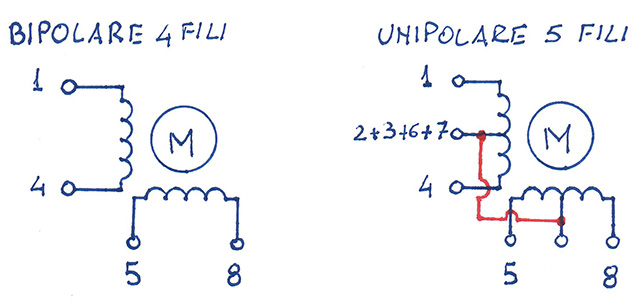 Sono presenti due avvolgimenti anziché quattro rispetto ad uno stepper unipolare. Entrambi gli avvolgimenti possono essere attivi in qualsiasi momento ma la polarità viene commutata su quattro fasi, ciò vuol dire che questo motore ha solo quattro fili anziché 5 (o 6 o 8).
Sono presenti due avvolgimenti anziché quattro rispetto ad uno stepper unipolare. Entrambi gli avvolgimenti possono essere attivi in qualsiasi momento ma la polarità viene commutata su quattro fasi, ciò vuol dire che questo motore ha solo quattro fili anziché 5 (o 6 o 8).
Per convertire un 28BYJ-48 da unipolare a bipolare bisogna interrompere la connessione indicata in rosso nell’immagine, quella contrassegnata con 2 + 3 + 6 + 7. La configurazione diventerebbe come quella rappresentata nell’immagine di sinistra.
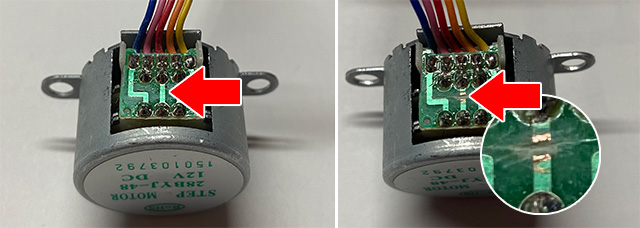
Per effettuare questa conversione è sufficiente un cutter ed un cacciavite. Come indicato nell’immagine che segue, utilizzate il cacciavite per sollevare il cappuccio azzurro che protegge un piccolo circuito elettronico in cui noterete 11 punti di saldatura, questo circuito non fa altro che collegare le varie bobine del passo passo.
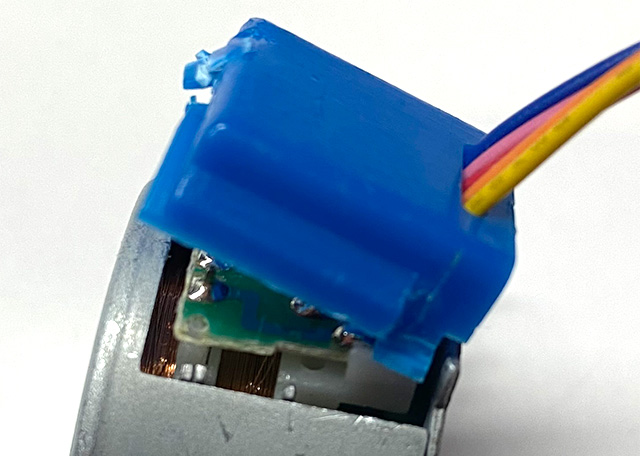 Interrompete la pista centrale come indicato nell’immagine in questo modo renderemo il passo passo bipolare.
Interrompete la pista centrale come indicato nell’immagine in questo modo renderemo il passo passo bipolare.
Questa modifica potrà farvi raggiungere gli 800 gcm che è almeno il doppio rispetto all’unipolare in full step (380 gcm) e quasi 3 volte di più per un unipolare half step (300 gcm).
A questo punto avremo bisogno di un driver che consenta il pilotaggio del motore, per questo potreste utilizzare L293D oppure un ULN2003 o ancora un A4988.
Fate riferimento agli articoli passati.
Non dimenticare di regolare al minimo la corrente del vostro driver A4988 / DRV8825, in quanto per questi motori non è possibile fornire più di 100 mA per fase, se superate questo valore potreste distruggere il motore.
Buon Making a tutti. 🙂
Grazie
Ci avevo provato ma di tagliare la pista ,non si avevo pensa .Staccavo il filo rosso e mi chiedevo perche no andava,Ignoranza .Ora ne so una di più
🙂
Grazie.