Recentemente la mia scuola ha rottamato diverse parti di computer, accumulati durante gli anni, ma prima di alienare la vetusta e rotta tecnologia abbiamo provveduto a recuperare quegli elementi che potrebbero tornare utili per realizzare alcune sperimentazioni in laboratori:
- motorini interni dei cd-rom
- alimentatori per computer per ricavarne alimentatori da banco
- viti
- cavi elettrici e jumper
- piattine IDE
- ventole di raffreddamento
- scanner rotti per realizzare dei piccoli bromografi
- …
E proprio le piattine IDE hanno risolto per me un problema organizzativo didattico importante.
In questo anno scolastico sto svolgendo due corsi su Arduino uno per la classe 4′ ed uno per la classe 5′, la disponibilità di schede Arduino non mi consente di munire ogni singolo allievo di 4′ e 5′ di una scheda.
A breve farò richiesta di acquisto di altre schede Arduino e ne costruiremo alcune, ma l’urgenza immediata è quella di far si che tutti gli allievi possano continuare le loro sperimentazioni in più giorni senza la necessità di smontare i progetti, consentendo ad altre classi di operare sulle schede.
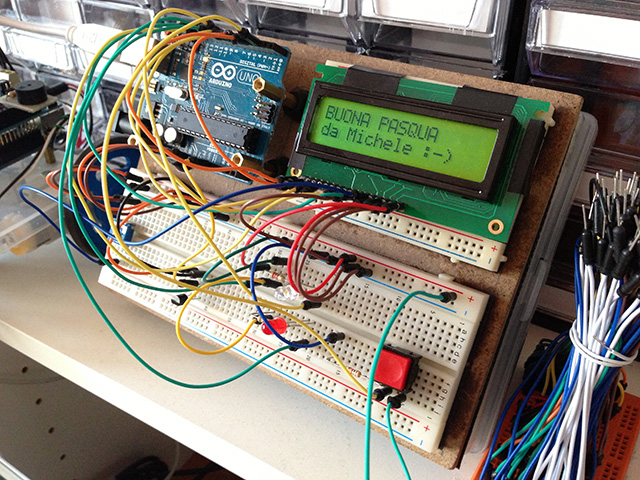
Per ovviare momentaneamente al problema ho utilizzate le piattine IDE recuperate dai computer rottamati per realizzare collegamenti diretti sulla breadboard in modo da mappare direttamente tutti (quasi) i pin di Arduino sulla breadboard, in questo modo l’allievo opererà direttamente sui collegamenti sulla breadboard, permettendomi agevolmente di collegare e scollegare “alla bisogna” la scheda.


Tutti i collegamenti resteranno intatti e i progetti potranno continuare anche per più giorni avendo (per ora) un numero non sufficiente di schede.
Ma come realizzare questa spartana soluzione?
Continua a leggere→



 Domenica sera sessione di “programmazione in cucina” 🙂 , realizzazione di panzerotti pugliesi ripieni di mozzarella e pomodoro… in genere ciò accade quando mi ritrovo con l’amico Sax e mentre si mangia: scambio di sogni, progetti e consigli tecnici. Tra gli appunti della serata
Domenica sera sessione di “programmazione in cucina” 🙂 , realizzazione di panzerotti pugliesi ripieni di mozzarella e pomodoro… in genere ciò accade quando mi ritrovo con l’amico Sax e mentre si mangia: scambio di sogni, progetti e consigli tecnici. Tra gli appunti della serata