Mi è stato chiesto negli scorsi giorni se le STEAM BOX sono oggetti sperimentati con le mie classi, certamente sì non tutte quelle che propongo ma le ho utilizzate durante i corsi di formazione per docenti e con gli studenti, ma non solo per le mie classi, colleghi della secondaria di primo grado, prendendo spunto dai miei suggerimenti ne hanno realizzato altre molto interessanti.
Per un futuro progetto che coinvolgerà le classi prime del mio istituto ne sto realizzando altre che mostro in anteprima nel corso STEAM BOX.
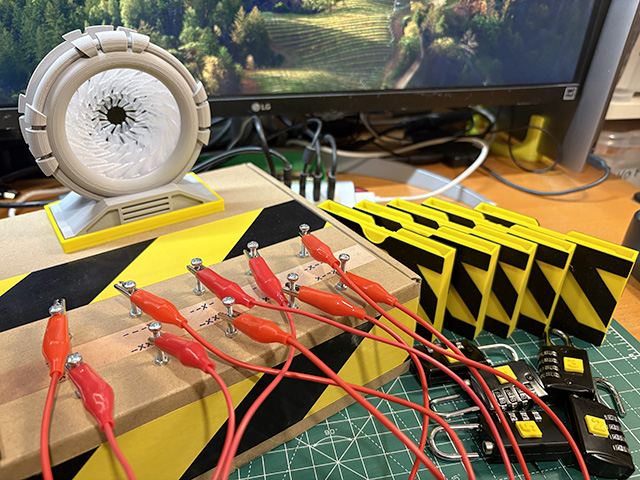
La scorsa settimana ho avuto occasione di rivedere, credo per la quinta volta, STARGATE, film di fantascienza del 1994 e dal film ne ho tratto un semplice gioco didattico che coinvolge diverse discipline del biennio dell’ITIS, di seguito condivido la trama della storia e dettagli fotografici del gioco. Per chi è iscritto al corso condividerò procedura di costruzione, file grafici, template per la creazione di attività simili e molto altro.
La storia introduttiva
Dovete riuscire ad attivare il portale! Potrebbe aprire un varco e riportarvi sulla Terra… o almeno lontano da questo pianeta. Ma il sistema è danneggiato: gli Anelli di Attivazione sono stati rimossi e chiusi in cinque contenitori di sicurezza, ognuno protetto da un codice a 4 cifre.
Sul pannello del manufatto si vedono anche 10 punti di connessione numerati. Dagli antichi schemi che siete riusciti a ricostruire emerge che il portale non è automatico: va ricablato manualmente. Solo collegando con precisione i 5 cavi di energia alle coppie di punti corrette e riposizionando i cinque anelli l’intero circuito si chiuderà. In quel momento, una luce si accenderà attraversando gli anelli e segnando l’attivazione del Gate.
Ora tocca a voi:
- 5 squadre,
- 5 anelli da recuperare,
- 5 codici da decifrare,
- 5 connessioni da completare.
Avete 60 minuti per risolvere i quesiti, aprire i contenitori, collegare i cavi e tentare l’attivazione del portale. Se ci riuscirete, forse rivedrete la Terra. Se fallirete, resterete bloccati su questo pianeta alieno…
Buon Making a tutti 🙂